Nゲージレイアウト、はる記念鉄道の製作9 [鉄道模型レイアウト製作]
こんにちは。
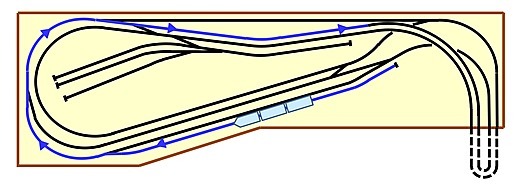
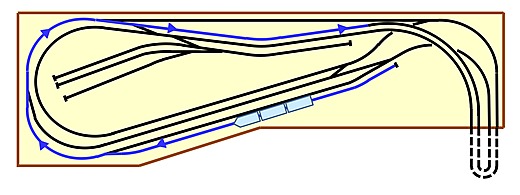
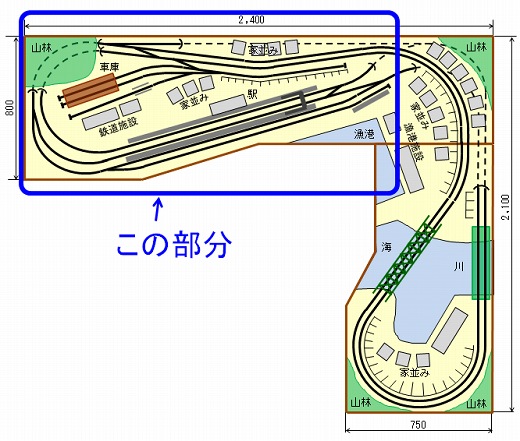
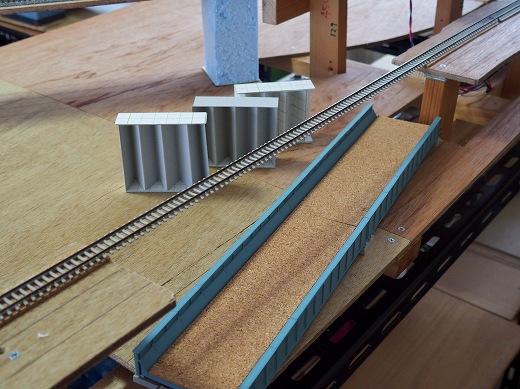
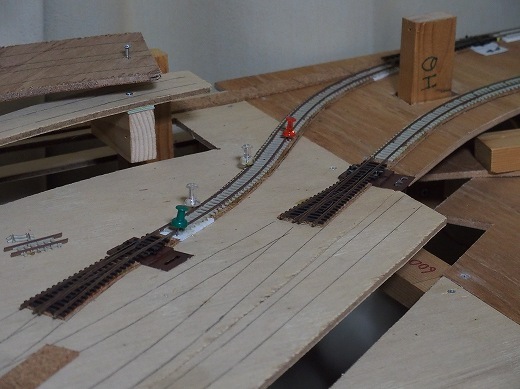
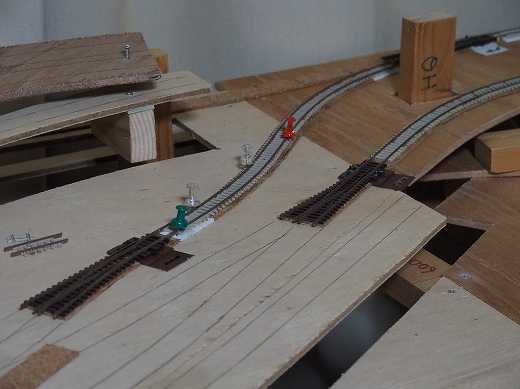
春兎崎(はるうさき)駅の側線の線路を敷きました。特急車両が乗っている線路です。

風景的に側線は貨物線にしようとしつつも重要な役割を担ってもらいます。いちばんコントロール台に近い線路なので、車両を組み立ててレイアウトに投入、また走り終えた車両の回収を行う線路として使います。

下図の青線のように車両を投入し・・・
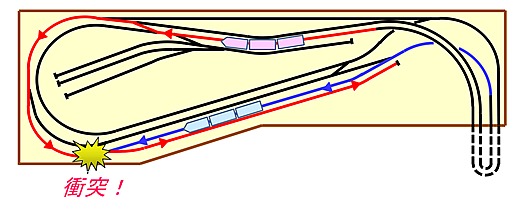
走り終えるときは下図の赤線の経路で側線へ戻します。
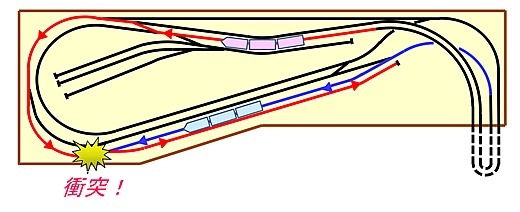
しかし何もしないと青線を走ってきた車両と衝突してしまいます。衝突を回避するよう手動で操作すれば別に問題ないのですが、それすらも面倒なので、どちらかの列車を自動で減速や停止して衝突を回避することを行ってみたいと思っています。
その他、勾配区間のスピードの変化を抑える制御も行ってみたく、そのために車両が通ったことが分かるセンサーを設置する予定です。そのセンサーの実験をしてみました。
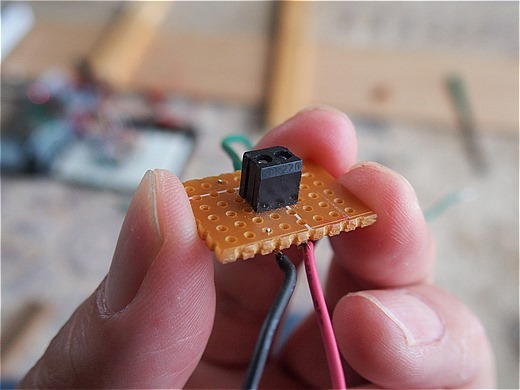
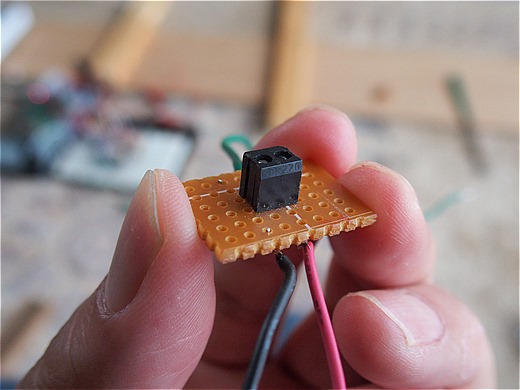
センサーはいろいろな方法があるかと思いますが、反射型フォトセンサー RPR200 というパーツを使ってみることにしました。

これは赤外線 LED の光を反射物で反射させて隣のフォトトランジスタで受けるというもので、2 本のレールの間に上を向けて設置し、車両が通ると車両で光が反射してフォトトランジスタが導通し、車両が通ったことを検知することができそうです。
また、レールの間に設置することで、ATS 地上子のような機器に見えて格好いいかも知れないと思っていました。
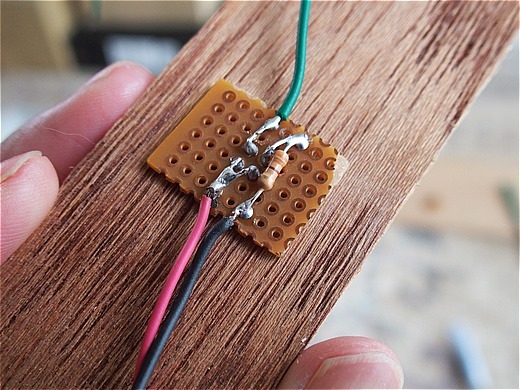
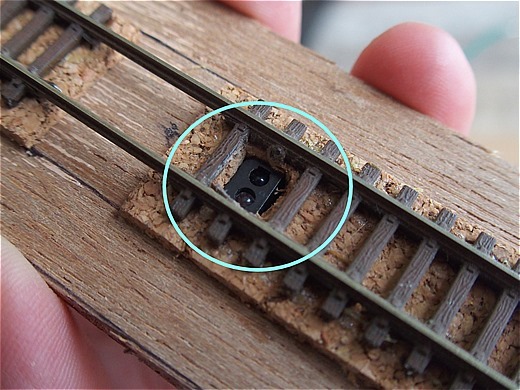
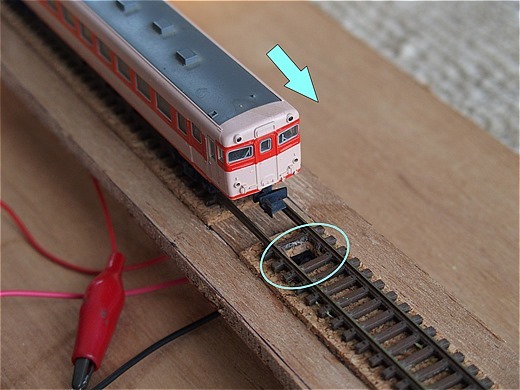
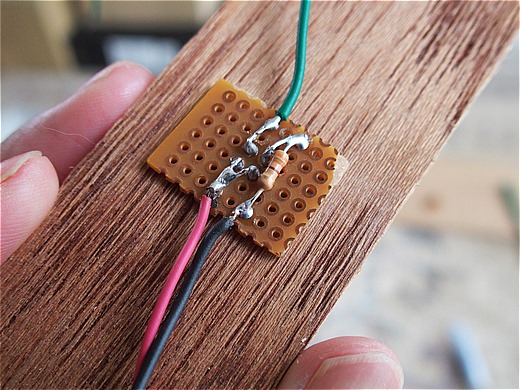
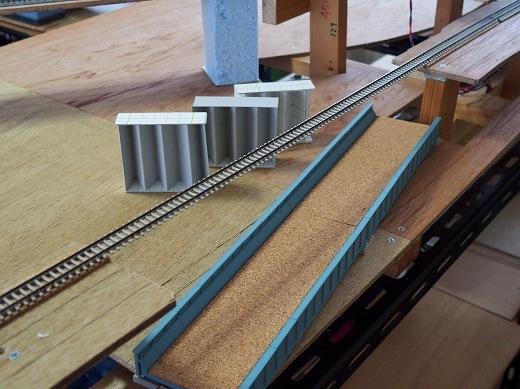
RPR200 は発光部から 6~8mm 離れた位置に反射物があるのがいちばん感度よく検知できるようです。そこで RPR200 をユニバーサル基板に奥まで差し込み・・・
土台のベニヤ板(5.5mm厚)に穴を開けて下から RPR200 を載せた基板を差し込むと、車両の床下機器の下や台車下が発光部から約 6mm の距離になりました。
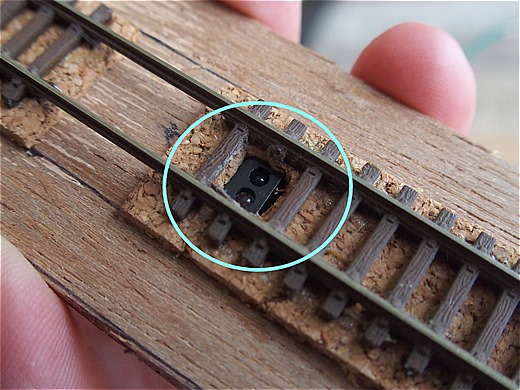
ただ 6mm の距離は意外と大きく、センサーが ATS 地上子に見えるどころか、穴ボコが開いたように見える結果になってしまいました。うーん、まあ、そんなに目立たなそうだし・・・これで進めてみますか。
今後、走行用 PWM の発生、ポイントの切り替え、衝突回避、操作画面の表示など、いろいろな制御をラズベリーパイで行う予定にしています。今後のことも踏まえて、こんな回路で試してみました。
センサーで検知したら LED を発光させるだけです。ただし検知を確認して LED を発行させる処理はラズベリーパイに組み込んだプログラムで行います。
センサー部は車両の床下の状況で何回も反応する可能性があることと、車両が通ったという記録を保持したいので、センサーの出力は RS フリップフロップで保持するようにしました。リセット後、センサーが最初に反応すると RS フリップフロップの出力が 1 で固定します。その状態をラズベリーパイで読み取るのですが、ラズベリーパイの GPIO は今後いろいろな用途で使うと足りなくなるので、I/O 拡張用の IC、MCP23017 を追加し、I2C を通じて読み取るようにしました。ラズベリーパイの GPIO は 電圧 3.3V で、 その他の回路は 5V で動作させる予定なので、I2C ライン上に 3.3V と 5V のレベル変換 を行う秋月電子さんのキットを挟みました。
ラズベリーパイでは、一定時間毎に MCP23017 を通じて RS フリップフロップの出力が 1 になっているか調べ、車両が通ったことを知るようにしました。また RS フリップフロップは次の検知に備えてリセットする必要がありますが、これはプログラムで実装することにします。
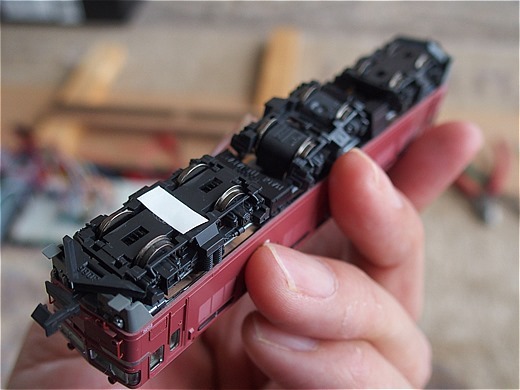
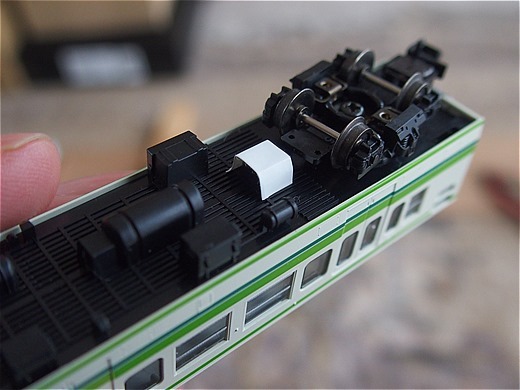
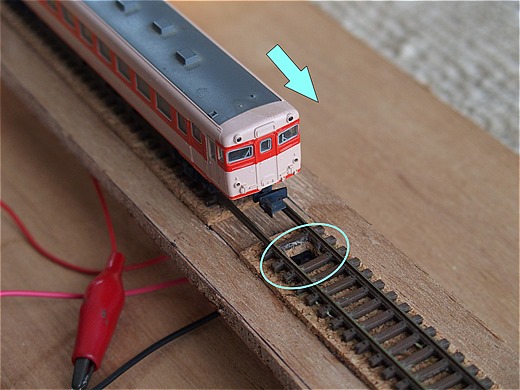
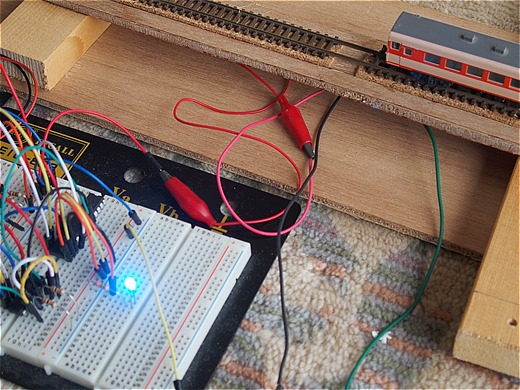
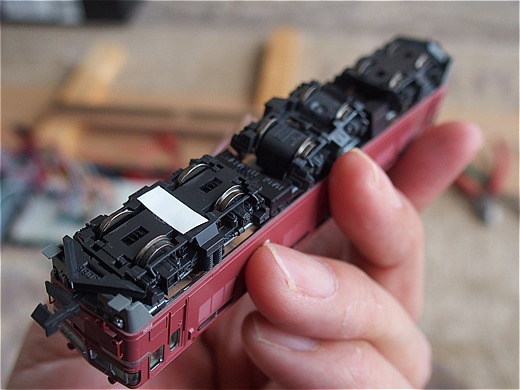
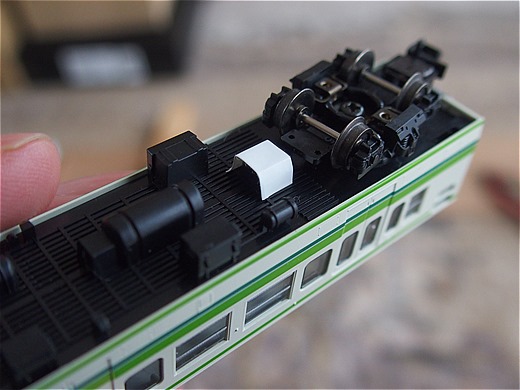
車両の床下は黒や灰色になっており、これだとセンサーがうまく反応してくれません。光が反射して確実に反応するよう床下を白くするのがよさそうです。まず仮で白のテープを貼ってみました。
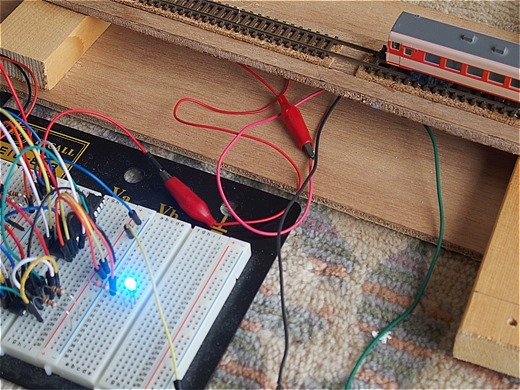
これでセンサーを通過させてみますと・・・
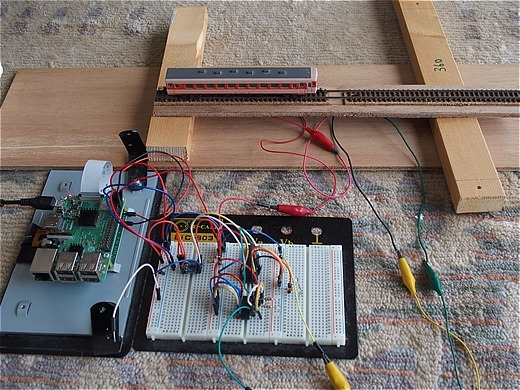
きちんと検知して LED が点灯しました!
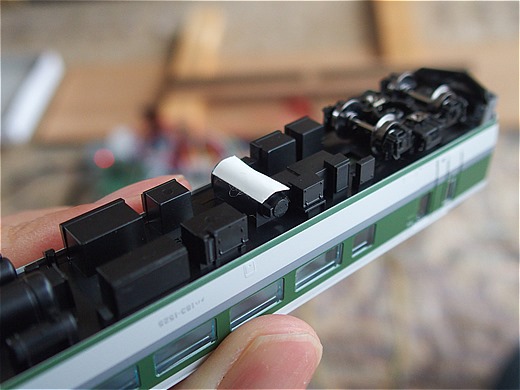
車両によって白テープをつける位置はこんなふうに変わりますが、きちんと反応してくれました。

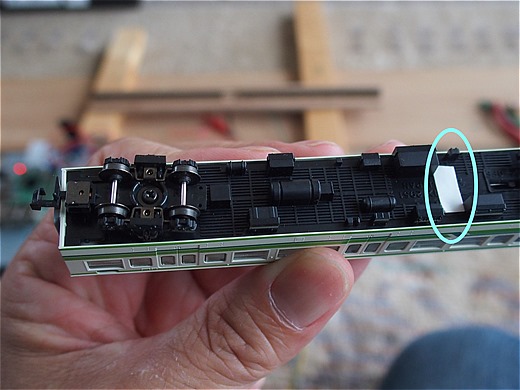
しかし、テープが貼れる適当な床下機器がなくて床板に直接貼った場合は、センサーからの距離が遠くなり反応しませんでした。
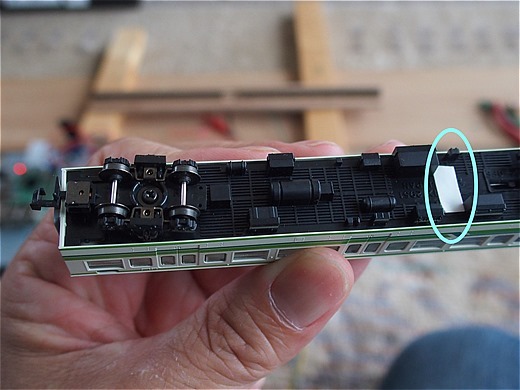
そのような場合でも、こんなふうに床下機器の一部だけでも白色にすれば反応しましたので、何とでもなりそうです。
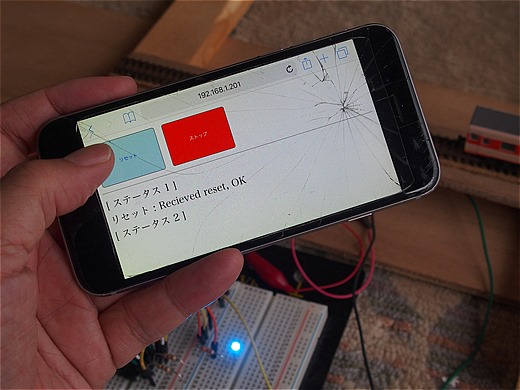
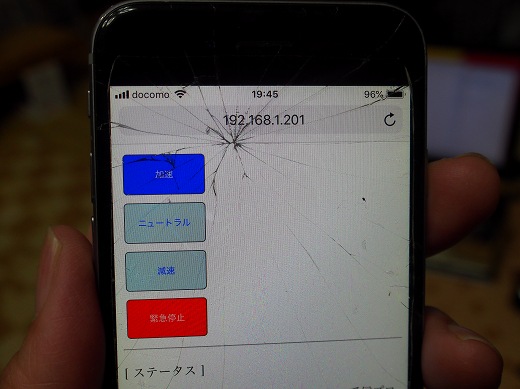
操作画面の表示はスマホなどで行おうと考えていますので、その練習として、RS フリップフロップのリセットをスマホから行うようにしてみました。スマホ画面上のボタンを押すと、RS フリップフロップがリセットされて LED が消え、次の車両の通過に備えることができます。
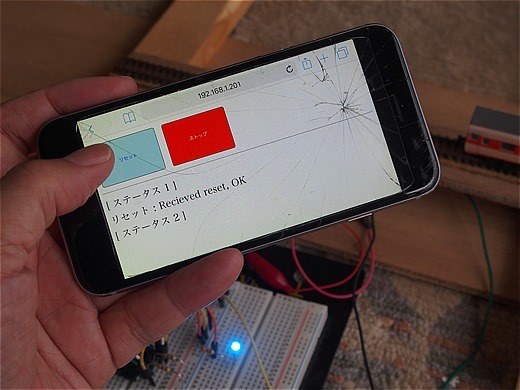
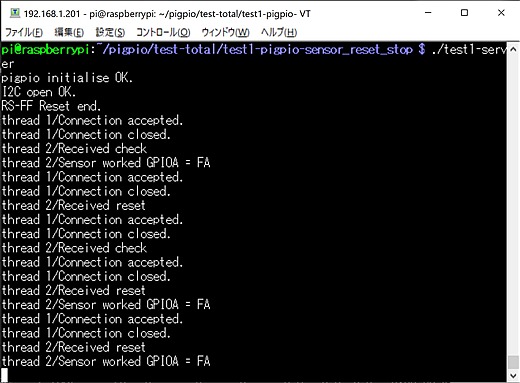
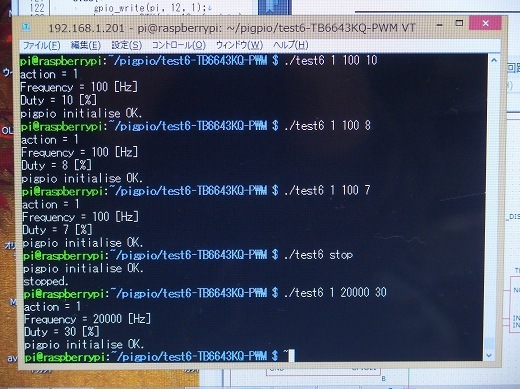
ラズベリーパイに Web サーバーとして Apache + PHP を入れてあります。スマホからのリクエストを受け取ったら UNIX ドメインソケットを通じて、本レイアウト用の専用サーバープログラムに情報を伝達し、その情報を受けて pigpio を使って GPIO を制御するようにしました。サーバープログラムは複数のスレッドを起こし、Web サーバーと情報のやり取りをするスレッド、GPIO を制御するスレッドなど、役割を分離することとしました。
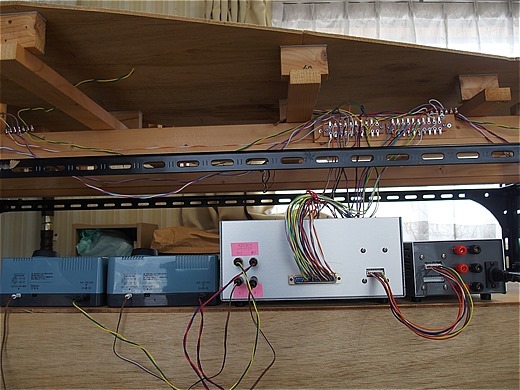
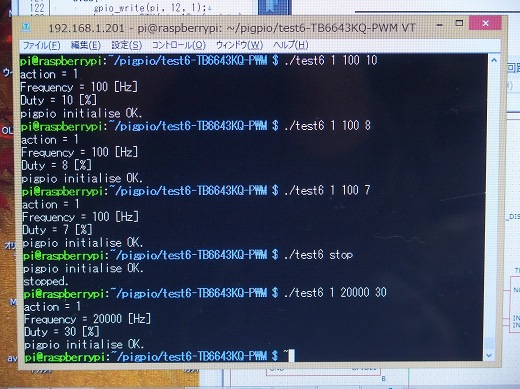
サーバープログラムが動作している様子・・・
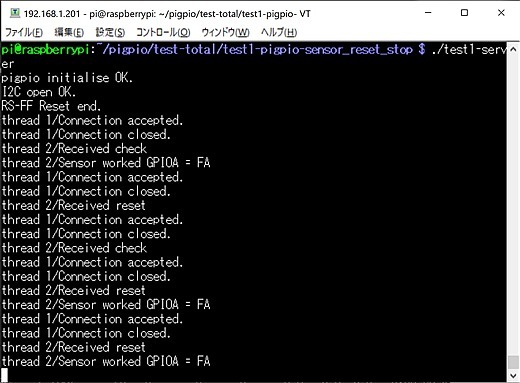
センサーの反応を確認するためだけなのに、なんだか大がかりな仕組みになってしまいました。でも、スマホでの操作、ラズベリーパイの中の情報伝達と役割の分離、拡張 I/O の制御など、今後行いたいことの基礎が今回の実験を通じてすべてできたと考えています。
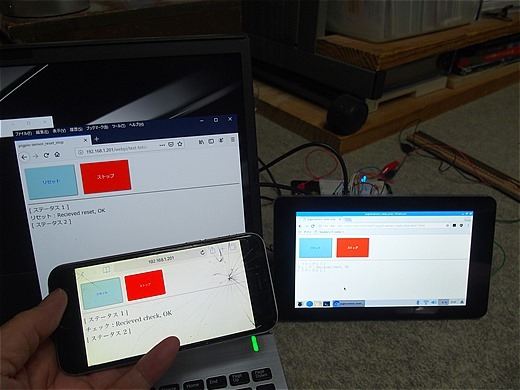
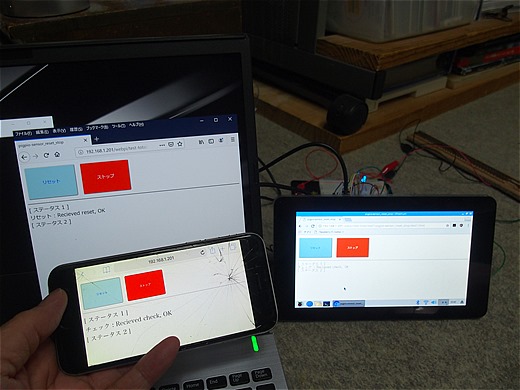
スマホでの操作と書きましたが、ブラウザで操作するため、スマホ以外にもパソコンや、ラズベリーパイのタッチモニタなどいろいろな機器で操作できるので、よくよく考えると面白いなと思いました。
失敗談です。
サーバープログラムを動かしていると、センサーで検知していないのに LED が突然点灯することがありました。センサーの誤反応ではなさそうだし、プログラムのバグでもなさそうだし、これくらいでノイズが乗るとも思えないし、分かりませんでした。念のため I2C ラインのプルアップ抵抗値を下げてみたりしても変わりませんでした。結局原因は MCP23017 の GPA、GPB の空き端子を開放していたのが良くなかったようです。GPA, GPB の初期状態は入力ピンになっているので 1 と 0 どっちつかずの状態で動作が不安定になっていたようです。初期化時に空き端子を内部プルアップする命令を発行するようにしたら問題の発生はなくなりました。電子回路は詳しくないので、解決するまで何日も悩みました。
★最近のはるちゃん★
堅い内容と茶色っぽい写真ばかりですみませんでした。目が覚めるような色ですっきりしていただけたら幸いです。

いつもと同じ、何気ないはるちゃんの様子です。

春兎崎(はるうさき)駅の側線の線路を敷きました。特急車両が乗っている線路です。

風景的に側線は貨物線にしようとしつつも重要な役割を担ってもらいます。いちばんコントロール台に近い線路なので、車両を組み立ててレイアウトに投入、また走り終えた車両の回収を行う線路として使います。

下図の青線のように車両を投入し・・・
走り終えるときは下図の赤線の経路で側線へ戻します。
しかし何もしないと青線を走ってきた車両と衝突してしまいます。衝突を回避するよう手動で操作すれば別に問題ないのですが、それすらも面倒なので、どちらかの列車を自動で減速や停止して衝突を回避することを行ってみたいと思っています。
その他、勾配区間のスピードの変化を抑える制御も行ってみたく、そのために車両が通ったことが分かるセンサーを設置する予定です。そのセンサーの実験をしてみました。
センサーはいろいろな方法があるかと思いますが、反射型フォトセンサー RPR200 というパーツを使ってみることにしました。

これは赤外線 LED の光を反射物で反射させて隣のフォトトランジスタで受けるというもので、2 本のレールの間に上を向けて設置し、車両が通ると車両で光が反射してフォトトランジスタが導通し、車両が通ったことを検知することができそうです。
また、レールの間に設置することで、ATS 地上子のような機器に見えて格好いいかも知れないと思っていました。
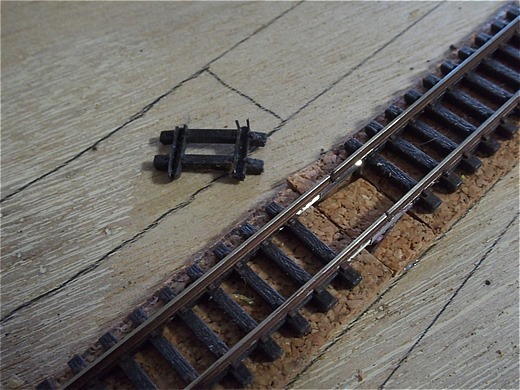
RPR200 は発光部から 6~8mm 離れた位置に反射物があるのがいちばん感度よく検知できるようです。そこで RPR200 をユニバーサル基板に奥まで差し込み・・・
土台のベニヤ板(5.5mm厚)に穴を開けて下から RPR200 を載せた基板を差し込むと、車両の床下機器の下や台車下が発光部から約 6mm の距離になりました。
ただ 6mm の距離は意外と大きく、センサーが ATS 地上子に見えるどころか、穴ボコが開いたように見える結果になってしまいました。うーん、まあ、そんなに目立たなそうだし・・・これで進めてみますか。
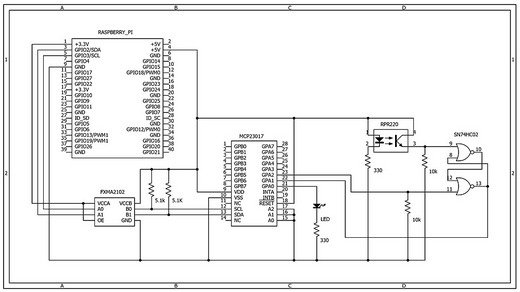
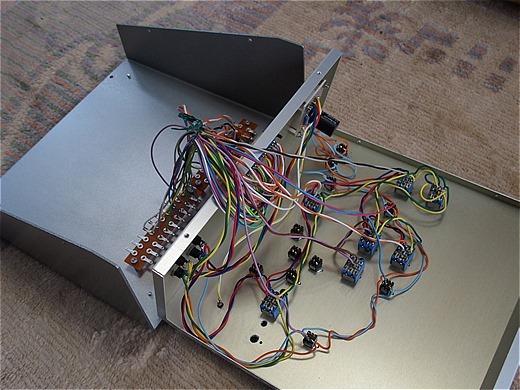
今後、走行用 PWM の発生、ポイントの切り替え、衝突回避、操作画面の表示など、いろいろな制御をラズベリーパイで行う予定にしています。今後のことも踏まえて、こんな回路で試してみました。
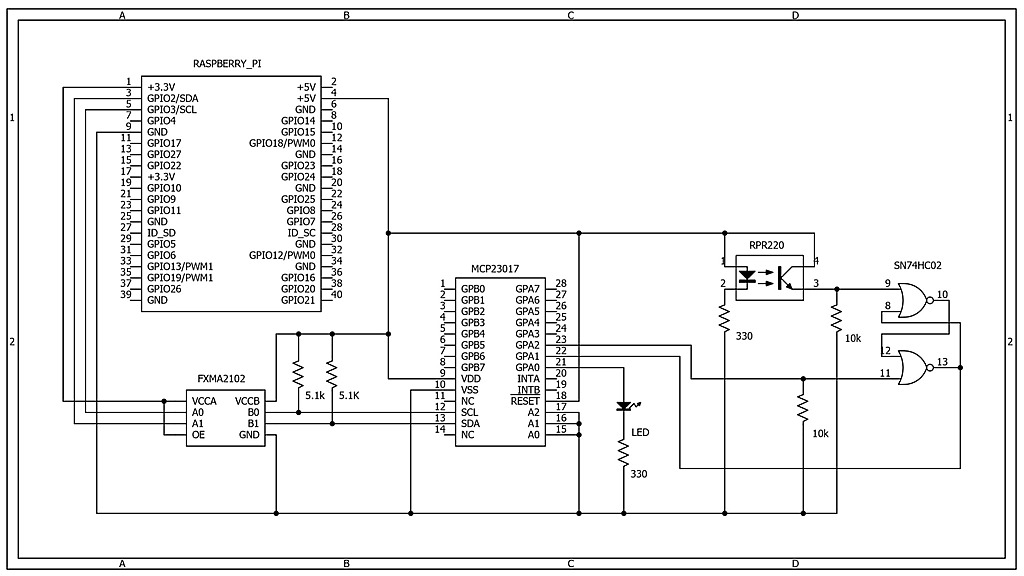
センサーで検知したら LED を発光させるだけです。ただし検知を確認して LED を発行させる処理はラズベリーパイに組み込んだプログラムで行います。
センサー部は車両の床下の状況で何回も反応する可能性があることと、車両が通ったという記録を保持したいので、センサーの出力は RS フリップフロップで保持するようにしました。リセット後、センサーが最初に反応すると RS フリップフロップの出力が 1 で固定します。その状態をラズベリーパイで読み取るのですが、ラズベリーパイの GPIO は今後いろいろな用途で使うと足りなくなるので、I/O 拡張用の IC、MCP23017 を追加し、I2C を通じて読み取るようにしました。ラズベリーパイの GPIO は 電圧 3.3V で、 その他の回路は 5V で動作させる予定なので、I2C ライン上に 3.3V と 5V のレベル変換 を行う秋月電子さんのキットを挟みました。
ラズベリーパイでは、一定時間毎に MCP23017 を通じて RS フリップフロップの出力が 1 になっているか調べ、車両が通ったことを知るようにしました。また RS フリップフロップは次の検知に備えてリセットする必要がありますが、これはプログラムで実装することにします。
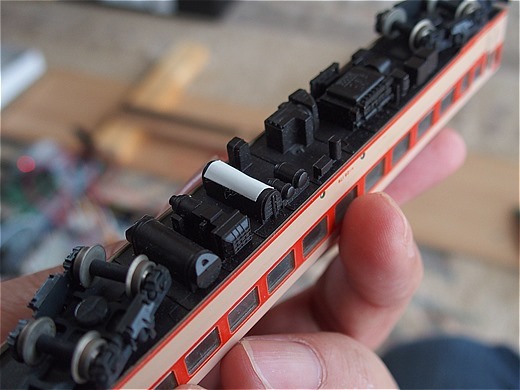
車両の床下は黒や灰色になっており、これだとセンサーがうまく反応してくれません。光が反射して確実に反応するよう床下を白くするのがよさそうです。まず仮で白のテープを貼ってみました。

これでセンサーを通過させてみますと・・・

きちんと検知して LED が点灯しました!
車両によって白テープをつける位置はこんなふうに変わりますが、きちんと反応してくれました。
しかし、テープが貼れる適当な床下機器がなくて床板に直接貼った場合は、センサーからの距離が遠くなり反応しませんでした。
そのような場合でも、こんなふうに床下機器の一部だけでも白色にすれば反応しましたので、何とでもなりそうです。
操作画面の表示はスマホなどで行おうと考えていますので、その練習として、RS フリップフロップのリセットをスマホから行うようにしてみました。スマホ画面上のボタンを押すと、RS フリップフロップがリセットされて LED が消え、次の車両の通過に備えることができます。
ラズベリーパイに Web サーバーとして Apache + PHP を入れてあります。スマホからのリクエストを受け取ったら UNIX ドメインソケットを通じて、本レイアウト用の専用サーバープログラムに情報を伝達し、その情報を受けて pigpio を使って GPIO を制御するようにしました。サーバープログラムは複数のスレッドを起こし、Web サーバーと情報のやり取りをするスレッド、GPIO を制御するスレッドなど、役割を分離することとしました。
サーバープログラムが動作している様子・・・
センサーの反応を確認するためだけなのに、なんだか大がかりな仕組みになってしまいました。でも、スマホでの操作、ラズベリーパイの中の情報伝達と役割の分離、拡張 I/O の制御など、今後行いたいことの基礎が今回の実験を通じてすべてできたと考えています。
スマホでの操作と書きましたが、ブラウザで操作するため、スマホ以外にもパソコンや、ラズベリーパイのタッチモニタなどいろいろな機器で操作できるので、よくよく考えると面白いなと思いました。
失敗談です。
サーバープログラムを動かしていると、センサーで検知していないのに LED が突然点灯することがありました。センサーの誤反応ではなさそうだし、プログラムのバグでもなさそうだし、これくらいでノイズが乗るとも思えないし、分かりませんでした。念のため I2C ラインのプルアップ抵抗値を下げてみたりしても変わりませんでした。結局原因は MCP23017 の GPA、GPB の空き端子を開放していたのが良くなかったようです。GPA, GPB の初期状態は入力ピンになっているので 1 と 0 どっちつかずの状態で動作が不安定になっていたようです。初期化時に空き端子を内部プルアップする命令を発行するようにしたら問題の発生はなくなりました。電子回路は詳しくないので、解決するまで何日も悩みました。
★最近のはるちゃん★
堅い内容と茶色っぽい写真ばかりですみませんでした。目が覚めるような色ですっきりしていただけたら幸いです。

いつもと同じ、何気ないはるちゃんの様子です。

Nゲージレイアウト、はる記念鉄道の製作8 [鉄道模型レイアウト製作]
こんにちは。
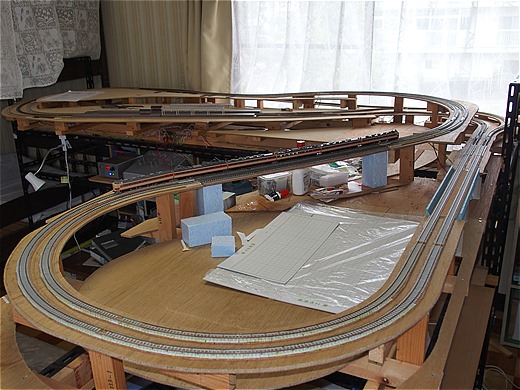
ようやく複線の線路を敷き終わり・・・

列車を 2 本同時に走らせることができるようになりました。

複線の線路間隔は TOMIX の橋梁を使う予定の部分を除き、全線 30mm で設計していました。しかし R280 のカーブでは車両が干渉するため 35mm 程度まで広げました。

春兎崎(はるうさき)駅です。ホームは仮です。側線や車庫の線路は、追々敷く予定。

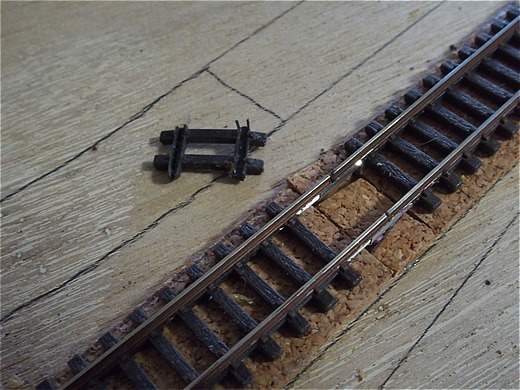
線路を接続するときに枕木をカットしたので・・・
その部分に再び枕木を接着する作業を地道に行っています。

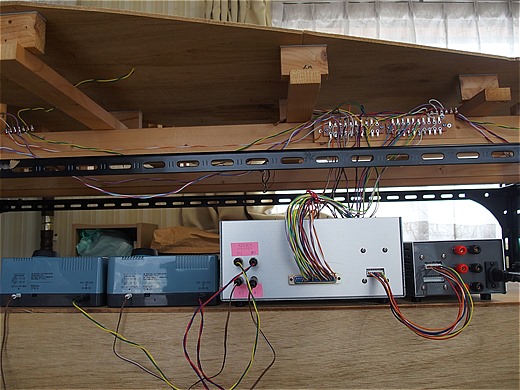
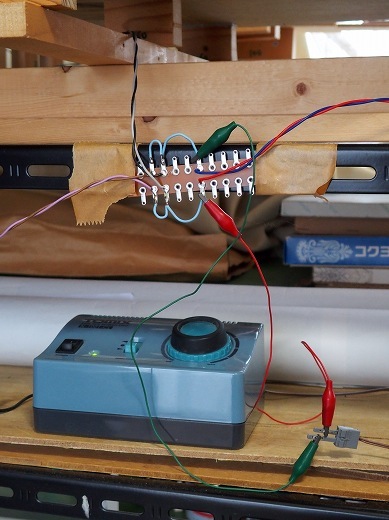
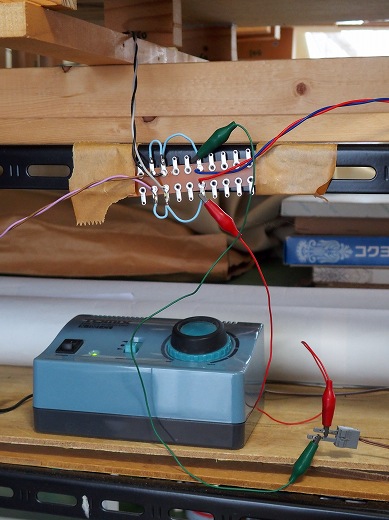
いずれラズベリーパイを使って半自動運転を行いたいと企んでいますが、まずは手動で運転できるようにします。レイアウト下に設けた運転台、左から電源装置、ポイントの切り替えや各区間へのどの電源を供給するか設定するスイッチボックス、そして市販のコントローラー 2 台を並べました。

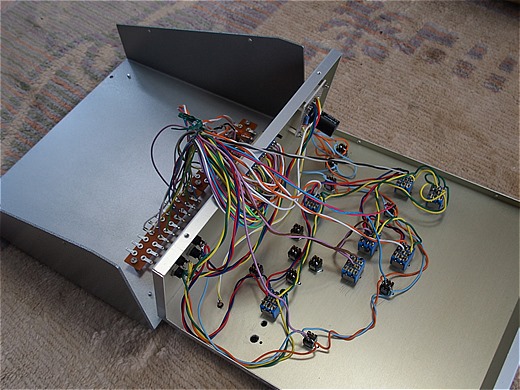
裏から見るとこんな感じで配線。
スイッチボックスは作成途中です。
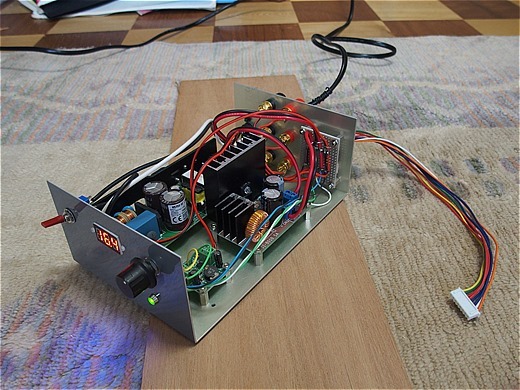
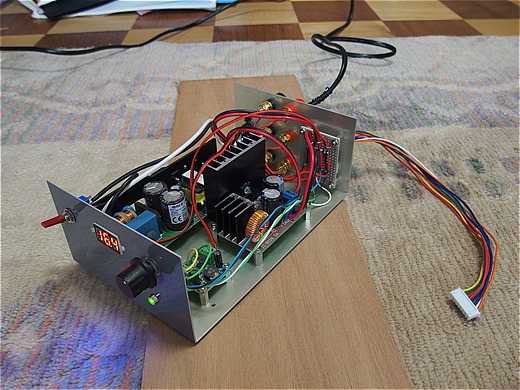
いろいろつなぎ 100V のコンセントがアダプターやコードで団子状態になるのが気にいらないため・・・

本レイアウトで使うすべての電源を供給する電源装置を作りました。市販の 12V で 6.3A 流せるスイッチング電源をメインに、昇圧用と降圧用のキットを組み合わせて、車両運転用の 12V、ラズベリーパイや照明などアクセサリー用に 5V、そしてポイント切り替え用に 12~22V 程度の可変可能な 3 種類の電源を供給できます。
スイッチボックスへは、XH コネクターを介して電源を供給しています。それ以外にいろいろな実験で使えるよう、バナナプラグで電源を取り出せるターミナルをつけてみました。
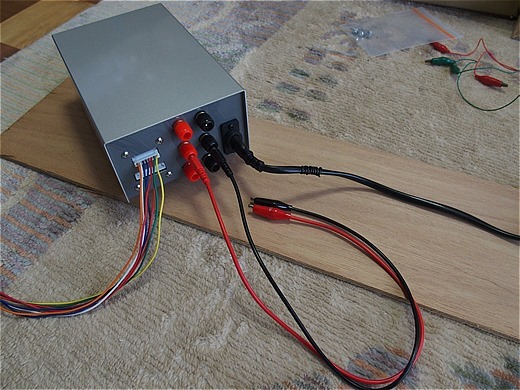
100V の電源ケーブルは 1 本になってすっきりしました。

ここまで作ったことで、複線で 2 本の列車をバンバン走らせることができるようになり、箱にしまったままだった車両が活躍できる場ができました。

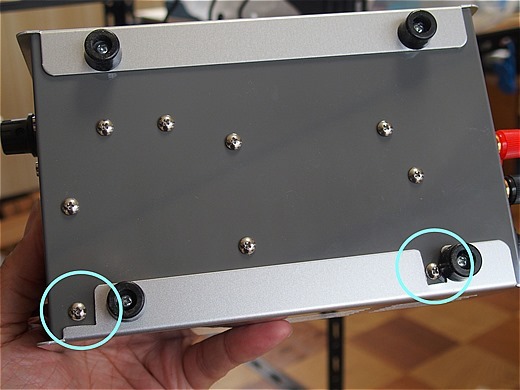
以下は失敗した部分です。
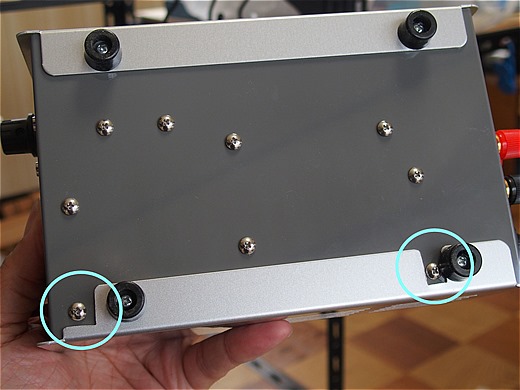
ネジと蓋が干渉して、蓋が閉まらなくなり・・・上蓋の一部をカット。まあ、見えないところだからいいか。
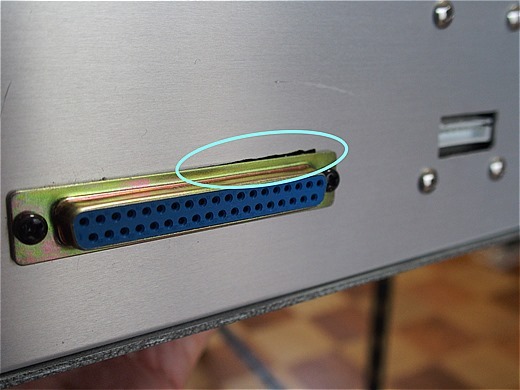
コネクタを入れる穴が大きすぎました。まあ、裏側だからいいか。
そして、きちんと接続して貼り合わせたつもりなのに・・・レールとレールの間が大きめの隙間に・・・
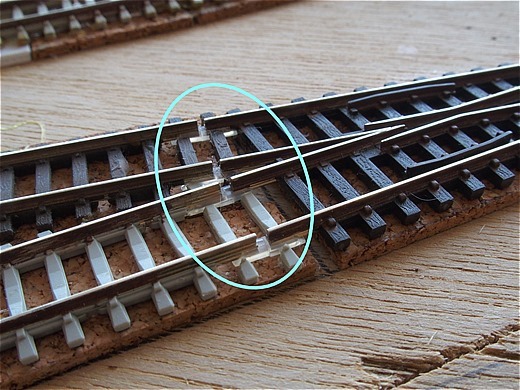
とりあえず走行に支障はありませんが、格好悪いので隙間を詰めて貼りなおしたいと思っています。
まだまだ先は長いな。
★最近のはるちゃん★
爽やかな春はあっという間に過ぎて、気づくと雨降りの季節に・・・

この春、はるちゃんは結局 1 回もベランダへ出ませんでした。出たそうなフリをするのですが、窓を開けると逃げてしまいます。

部屋の中でゴロゴロしているのが安心なようです。

ようやく複線の線路を敷き終わり・・・
列車を 2 本同時に走らせることができるようになりました。

複線の線路間隔は TOMIX の橋梁を使う予定の部分を除き、全線 30mm で設計していました。しかし R280 のカーブでは車両が干渉するため 35mm 程度まで広げました。

春兎崎(はるうさき)駅です。ホームは仮です。側線や車庫の線路は、追々敷く予定。

線路を接続するときに枕木をカットしたので・・・
その部分に再び枕木を接着する作業を地道に行っています。

いずれラズベリーパイを使って半自動運転を行いたいと企んでいますが、まずは手動で運転できるようにします。レイアウト下に設けた運転台、左から電源装置、ポイントの切り替えや各区間へのどの電源を供給するか設定するスイッチボックス、そして市販のコントローラー 2 台を並べました。

裏から見るとこんな感じで配線。
スイッチボックスは作成途中です。
いろいろつなぎ 100V のコンセントがアダプターやコードで団子状態になるのが気にいらないため・・・

本レイアウトで使うすべての電源を供給する電源装置を作りました。市販の 12V で 6.3A 流せるスイッチング電源をメインに、昇圧用と降圧用のキットを組み合わせて、車両運転用の 12V、ラズベリーパイや照明などアクセサリー用に 5V、そしてポイント切り替え用に 12~22V 程度の可変可能な 3 種類の電源を供給できます。
スイッチボックスへは、XH コネクターを介して電源を供給しています。それ以外にいろいろな実験で使えるよう、バナナプラグで電源を取り出せるターミナルをつけてみました。
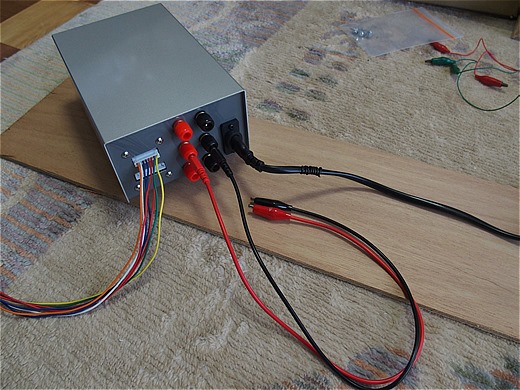
100V の電源ケーブルは 1 本になってすっきりしました。

ここまで作ったことで、複線で 2 本の列車をバンバン走らせることができるようになり、箱にしまったままだった車両が活躍できる場ができました。

以下は失敗した部分です。
ネジと蓋が干渉して、蓋が閉まらなくなり・・・上蓋の一部をカット。まあ、見えないところだからいいか。
コネクタを入れる穴が大きすぎました。まあ、裏側だからいいか。
そして、きちんと接続して貼り合わせたつもりなのに・・・レールとレールの間が大きめの隙間に・・・
とりあえず走行に支障はありませんが、格好悪いので隙間を詰めて貼りなおしたいと思っています。
まだまだ先は長いな。
★最近のはるちゃん★
爽やかな春はあっという間に過ぎて、気づくと雨降りの季節に・・・

この春、はるちゃんは結局 1 回もベランダへ出ませんでした。出たそうなフリをするのですが、窓を開けると逃げてしまいます。

部屋の中でゴロゴロしているのが安心なようです。
Nゲージレイアウト、はる記念鉄道の製作7 [鉄道模型レイアウト製作]
こんにちは。
製作中の N ゲージレイアウト「はる鉄道」。いつも一緒にいてくれるうさぎのはるちゃんへの感謝の気持ちから、名前を少し変更して「はる記念鉄道」としました。
レイアウト本体の進捗はありません。ラズベリーパイを使っていろいろな制御をしてみたく、その基礎となるテストをしていました。
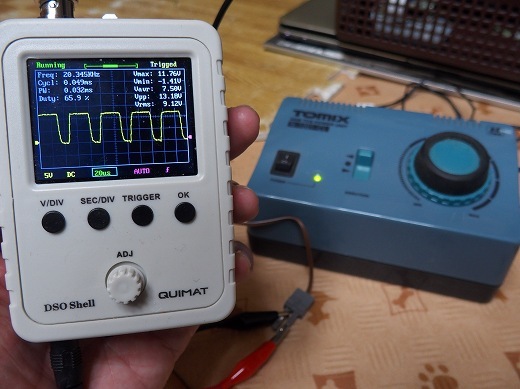
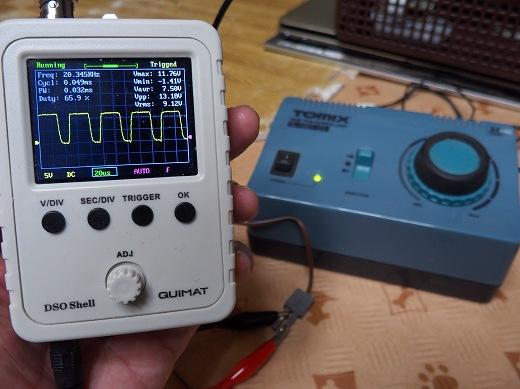
その一つ、列車の走行を PWM で行うべく試してみました。手持ちの Tomix のコントローラーは 20KHz の PWM 制御のようですので、これと同じような出力をさせることにします。
ラズベリーパイの GPIO のコントロールは今後 pigpio ライブラリを使うことにしました。今まで試していた Wiring Pi と比べて、デーモン pigpiod を動かしておくことにより、root 権限でなくてもハードウェア PWM を使えるし、レンジとか面倒な計算しなくても 例えば GPIO12 ピンへ 20kHz でデューティー比 50% を出力するなら hardware_PWM(pi, 12, 20000, 500000); のように関数一つでハードウェア PWM が使えるのが楽だったためです。なお pigpio は安定したソフトウェア PWM が使えるようですが、ラズベリーパイに元々備わっているハードウェア PWM を使うことにしています。
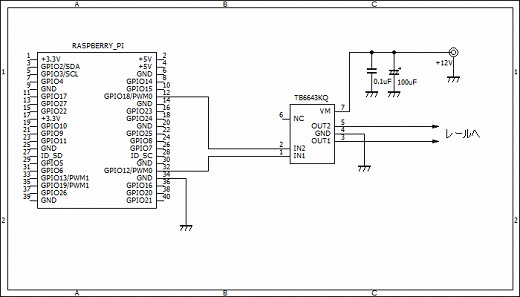
こんな回路にしてみました。回路図ソフトは Bsch3v を利用させてもらっています。
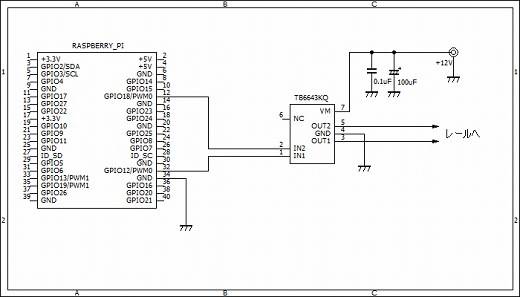
注:私は素人ですので問題のある回路、書き方があると思いますがご勘弁ください。また、もしこの回路を使ったとして生じた事故や不具合は一切責任を負いかねますので、あくまで参考程度でお願いします。
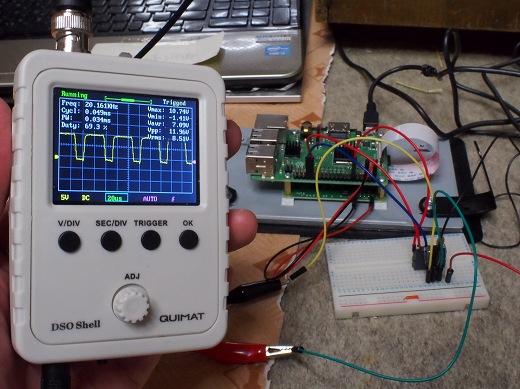
モータードライバーは TB6643KQ を使いました。IN1, IN2 を H にすることでブレーキ、回転方向により適切なほうを繰り返し L にすることで PWM 動作をさせることができるようです。従って停止は IN1, IN2 が H になるよう GPIO ピンを出力し、20KHz でデューティー比 10% にするなら逆に 90% を指定し hardware_PWM(pi, 12, 20000, 900000); のように関数実行することで目的の PWM 動作をさせることができました。
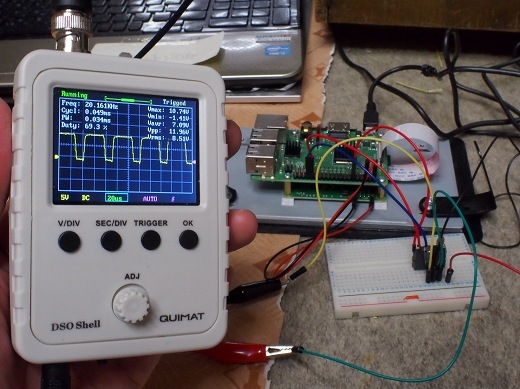
ちなみに周波数を 100Hz にしてみたら超スロー走行ができて楽しいです。ただ車両からブーンと音がでます。気動車でしたらエンジン音みたいで面白いなと思いました。適切な周波数はこれからいろいろ試してみたいと思います。
また、PWM 出力はコマンドラインで実行して試しましたが・・・
ラズベリーパイのタッチスクリーンやスマホなどで操作できるようにする予定です。
(まだ操作できません。)
ラズベリーパイで制御するために、いろいろな書籍やネット上の各サイト様の情報を参考にしています。とても全て書けないのですが、参考にさせてもらった情報の提供者様に感謝しています。ありがとうございます。
さて、ここからは戯言です。
レイアウトの駅の配線と路線の名前などについて書きます。
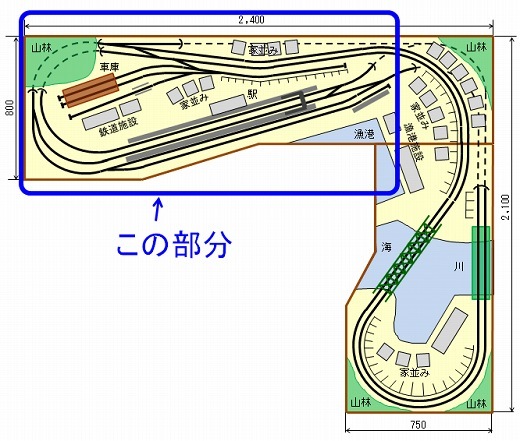
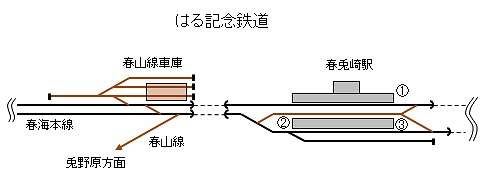
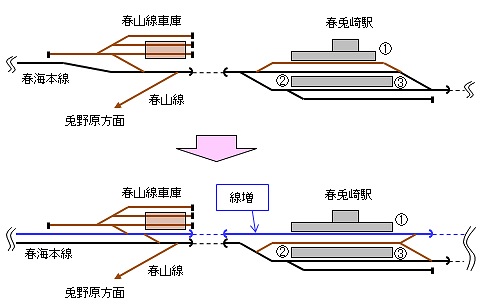
レイアウトでは線路がぐるっと 180 度回転していますが、まっすぐにすると駅周辺は下図のような配線になっています。
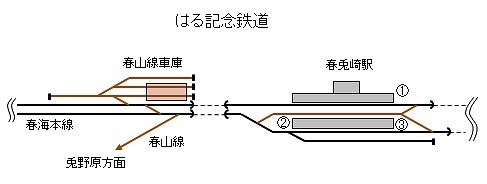
先般、名前を決めた春兎崎(はるうさき)駅は複線電化の本線上の中間駅で、かつ非電化のローカル支線が分岐する駅です。その支線の名前は先代うさぎのはる爺さん(今日 3/17 ははるさんが亡くなってちょうど 6 年になりました)から名前をとって春山(はるさん)線としました。そしてその行先は、本当は採用したかった駅名、うさぎが遊ぶ野原が広がる里山の駅、兎野原(うさぎのはる)としました。複線の本線は海沿いを走る路線なので春山線の山に対して海とし、春海本線(はるみほんせん)としました。
兎野原方面からやってきた春山線は駅手前にトンネルがある関係で一旦春海本線左行きに合流したあと春兎崎駅の 2 番線に発着し、さらに春海本線右行きへの乗り入れができる配線になっています。春山線車両の車庫は地形の関係上、トンネルを越えた離れた場所にあります。
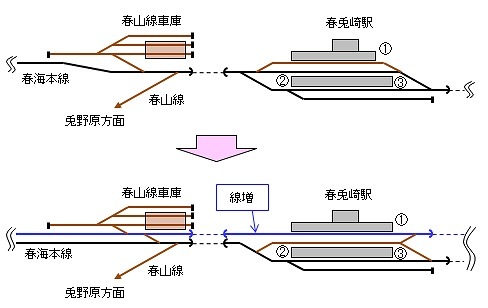
またこんな歴史も考えました。昔、春海本線は非電化単線でその当時の駅の配線は下図のようになっていました。当時、支線の春山線は春兎崎駅の 1 番線に発着していました。その後、複線電化を機に青色で示す線増がなされ、1 番線は春海本線右行き用に、代わりに 2 番線が春山線用に変更になりました。
そして春兎崎駅は山形鉄道宮内駅のようにうさぎ駅長がいる駅としたいと思います。
このような妄想は楽しいです。実際のレイアウトは上記のような運転を行う訳ではありませんが、その歴史を考慮して例えば単線時代から使われているトンネルはレンガ造り、線増したほうのトンネルはコンクリート造りにするなど、変化を加えてみたいと考えています。
★最近のはるちゃん★
楽しいときも辛い時も、いつも一緒に過ごしてくれているはるちゃん・・・


私たちのところへ来てくれて本当にありがとう!
製作中の N ゲージレイアウト「はる鉄道」。いつも一緒にいてくれるうさぎのはるちゃんへの感謝の気持ちから、名前を少し変更して「はる記念鉄道」としました。
レイアウト本体の進捗はありません。ラズベリーパイを使っていろいろな制御をしてみたく、その基礎となるテストをしていました。
その一つ、列車の走行を PWM で行うべく試してみました。手持ちの Tomix のコントローラーは 20KHz の PWM 制御のようですので、これと同じような出力をさせることにします。
ラズベリーパイの GPIO のコントロールは今後 pigpio ライブラリを使うことにしました。今まで試していた Wiring Pi と比べて、デーモン pigpiod を動かしておくことにより、root 権限でなくてもハードウェア PWM を使えるし、レンジとか面倒な計算しなくても 例えば GPIO12 ピンへ 20kHz でデューティー比 50% を出力するなら hardware_PWM(pi, 12, 20000, 500000); のように関数一つでハードウェア PWM が使えるのが楽だったためです。なお pigpio は安定したソフトウェア PWM が使えるようですが、ラズベリーパイに元々備わっているハードウェア PWM を使うことにしています。
こんな回路にしてみました。回路図ソフトは Bsch3v を利用させてもらっています。
注:私は素人ですので問題のある回路、書き方があると思いますがご勘弁ください。また、もしこの回路を使ったとして生じた事故や不具合は一切責任を負いかねますので、あくまで参考程度でお願いします。
モータードライバーは TB6643KQ を使いました。IN1, IN2 を H にすることでブレーキ、回転方向により適切なほうを繰り返し L にすることで PWM 動作をさせることができるようです。従って停止は IN1, IN2 が H になるよう GPIO ピンを出力し、20KHz でデューティー比 10% にするなら逆に 90% を指定し hardware_PWM(pi, 12, 20000, 900000); のように関数実行することで目的の PWM 動作をさせることができました。
ちなみに周波数を 100Hz にしてみたら超スロー走行ができて楽しいです。ただ車両からブーンと音がでます。気動車でしたらエンジン音みたいで面白いなと思いました。適切な周波数はこれからいろいろ試してみたいと思います。
また、PWM 出力はコマンドラインで実行して試しましたが・・・
ラズベリーパイのタッチスクリーンやスマホなどで操作できるようにする予定です。
(まだ操作できません。)
ラズベリーパイで制御するために、いろいろな書籍やネット上の各サイト様の情報を参考にしています。とても全て書けないのですが、参考にさせてもらった情報の提供者様に感謝しています。ありがとうございます。
さて、ここからは戯言です。
レイアウトの駅の配線と路線の名前などについて書きます。
レイアウトでは線路がぐるっと 180 度回転していますが、まっすぐにすると駅周辺は下図のような配線になっています。
先般、名前を決めた春兎崎(はるうさき)駅は複線電化の本線上の中間駅で、かつ非電化のローカル支線が分岐する駅です。その支線の名前は先代うさぎのはる爺さん(今日 3/17 ははるさんが亡くなってちょうど 6 年になりました)から名前をとって春山(はるさん)線としました。そしてその行先は、本当は採用したかった駅名、うさぎが遊ぶ野原が広がる里山の駅、兎野原(うさぎのはる)としました。複線の本線は海沿いを走る路線なので春山線の山に対して海とし、春海本線(はるみほんせん)としました。
兎野原方面からやってきた春山線は駅手前にトンネルがある関係で一旦春海本線左行きに合流したあと春兎崎駅の 2 番線に発着し、さらに春海本線右行きへの乗り入れができる配線になっています。春山線車両の車庫は地形の関係上、トンネルを越えた離れた場所にあります。
またこんな歴史も考えました。昔、春海本線は非電化単線でその当時の駅の配線は下図のようになっていました。当時、支線の春山線は春兎崎駅の 1 番線に発着していました。その後、複線電化を機に青色で示す線増がなされ、1 番線は春海本線右行き用に、代わりに 2 番線が春山線用に変更になりました。
そして春兎崎駅は山形鉄道宮内駅のようにうさぎ駅長がいる駅としたいと思います。
このような妄想は楽しいです。実際のレイアウトは上記のような運転を行う訳ではありませんが、その歴史を考慮して例えば単線時代から使われているトンネルはレンガ造り、線増したほうのトンネルはコンクリート造りにするなど、変化を加えてみたいと考えています。
★最近のはるちゃん★
楽しいときも辛い時も、いつも一緒に過ごしてくれているはるちゃん・・・


私たちのところへ来てくれて本当にありがとう!
Nゲージレイアウト、はる鉄道の製作6 [鉄道模型レイアウト製作]
こんにちは。
再び始めた鉄道模型 N ゲージレイアウトの製作 6 回目です。うさぎのはるちゃんにちなんで、レイアウトの鉄道名を「はる鉄道」とし、タイトルも変更しました。
老眼に大人げなくイライラしつつも、ようやく単線分のレールを敷き終えました。これで暫定で周回運転ができるようになりました。

長方形のモジュールを連結して L 字形にします。接続部は TOMIX のフレキシブルレールで接続します。

以前の製作では、製作が進むうちに接続部の路盤の高さが微妙に変化したため、高さをきっちり固定にせず、少し弾力性を持たせました。効果のほどはまだ不明です。

ここは TOMIX の複線大トラス鉄橋を架ける予定です。しかし製作中に破壊する恐れがあるため、当面仮の橋を架けておくことにします。

こちらの橋梁は KATO の複線下路デッキガーター橋を使いました。ただし橋脚は紙で作った仮の橋脚です。
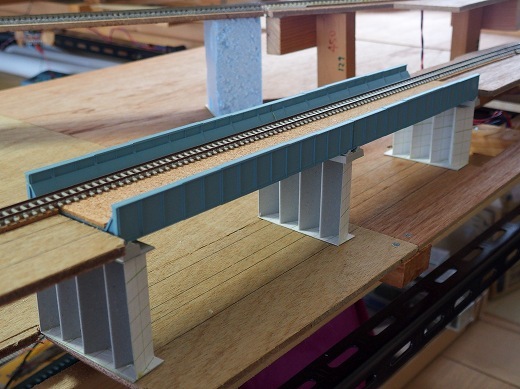
こちらも橋梁下の水面を作るときに邪魔になるので、当面取り外せるようにしています。
勾配は設計上、最大 3% でしたが、高さを調整しながら路盤を作ったら、実際はもう少し急な勾配、4% 程度になってしまったかも知れません。この勾配をスムーズに走るのか、早く試してみたかったのです。そのため、コントローラー周りも仮配線のままです。
手持ちのいくつかの車両で試してみました。

3 両編成程度までで走らせる予定の普通列車は問題ありません。なんだか複線化工事中の路線みたい。まあ、本当に複線化準備中なのですが・・・

6 両編成の特急列車だと多少スピード変化はありますが、それほど見苦しくはなかったです。

ぜひとも走らせてみたかった長大編成の貨物列車、10 両のコンテナ車を牽引。勾配は問題なく登れましたが、さすがに登りと下りでスピード変化が気になりました。

ぜひ長大貨物列車をスムーズに走れるようにしたい・・・自動制御でなんとかできるのか、この辺は今後の課題です。
それでもレールの継ぎ目を通過するカタンカタンという音を聞くと、なんだか癒される気分です。

ここは駅を作ります。まず中線を先に敷きました。中線を基準にホームをあてながら両側の上下本線を敷く計画です。ホームの有効長は 6 両なので、旅客列車は 6 両編成までで運用します。

さて、鉄道名は「はる鉄道」としました。駅名もうさぎのはるちゃんにちなんで、「うさぎのはる」としたかったのです。漢字で書くと「兎野原」。九州の地名風に原をはると読むことにしました。月夜にうさぎがぴょんと跳ねて遊ぶ、かやぶき屋根と棚田が広がる里山の田舎駅・・・そんな駅にぴったりの名前だと思いましたが、当レイアウトは日本海縦貫線沿線風の漁村風景。「うさぎのはる」という名前は今後のためにとっておくことにし、海沿いっぽい名前を考えました。
そこで「うさぎのはる」→「はるうさぎ」→「はるうさき」とし、漢字では「春兎崎」
と書くことにしました。うさぎのはるちゃんにちなみ、かつ海沿いっぽい名前になったかな?
・・・ということで、当レイアウトは「はる鉄道 春兎崎(はるうさき)駅と漁村風景」となります。
最後は命名についての戯言、失礼いたしました。
★最近のはるちゃん★
はるちゃんのケージに何だか飾りつけがされているぞ。

そうです。2 月 8 日ははるちゃん 6 歳の誕生日でした。元気に誕生日を迎えられることができて本当に良かったです。

はるちゃんもお祝いゲートをジャンプして通り抜け、嬉しさをアピール(?)していました。

6 歳は人間換算で 52 歳となるようです。ついにはるちゃんは私を追い抜いてしまいました。元気と書きましたが、歳をとってきたせいか、飼い主のまねをしているのか、以前よりじっとしていることが多くなりました。動くのが億劫でゴロゴロしていたい気持ちは分かるように思います。
再び始めた鉄道模型 N ゲージレイアウトの製作 6 回目です。うさぎのはるちゃんにちなんで、レイアウトの鉄道名を「はる鉄道」とし、タイトルも変更しました。
老眼に大人げなくイライラしつつも、ようやく単線分のレールを敷き終えました。これで暫定で周回運転ができるようになりました。

長方形のモジュールを連結して L 字形にします。接続部は TOMIX のフレキシブルレールで接続します。

以前の製作では、製作が進むうちに接続部の路盤の高さが微妙に変化したため、高さをきっちり固定にせず、少し弾力性を持たせました。効果のほどはまだ不明です。

ここは TOMIX の複線大トラス鉄橋を架ける予定です。しかし製作中に破壊する恐れがあるため、当面仮の橋を架けておくことにします。

こちらの橋梁は KATO の複線下路デッキガーター橋を使いました。ただし橋脚は紙で作った仮の橋脚です。

こちらも橋梁下の水面を作るときに邪魔になるので、当面取り外せるようにしています。
勾配は設計上、最大 3% でしたが、高さを調整しながら路盤を作ったら、実際はもう少し急な勾配、4% 程度になってしまったかも知れません。この勾配をスムーズに走るのか、早く試してみたかったのです。そのため、コントローラー周りも仮配線のままです。
手持ちのいくつかの車両で試してみました。

3 両編成程度までで走らせる予定の普通列車は問題ありません。なんだか複線化工事中の路線みたい。まあ、本当に複線化準備中なのですが・・・

6 両編成の特急列車だと多少スピード変化はありますが、それほど見苦しくはなかったです。

ぜひとも走らせてみたかった長大編成の貨物列車、10 両のコンテナ車を牽引。勾配は問題なく登れましたが、さすがに登りと下りでスピード変化が気になりました。

ぜひ長大貨物列車をスムーズに走れるようにしたい・・・自動制御でなんとかできるのか、この辺は今後の課題です。
それでもレールの継ぎ目を通過するカタンカタンという音を聞くと、なんだか癒される気分です。

ここは駅を作ります。まず中線を先に敷きました。中線を基準にホームをあてながら両側の上下本線を敷く計画です。ホームの有効長は 6 両なので、旅客列車は 6 両編成までで運用します。

さて、鉄道名は「はる鉄道」としました。駅名もうさぎのはるちゃんにちなんで、「うさぎのはる」としたかったのです。漢字で書くと「兎野原」。九州の地名風に原をはると読むことにしました。月夜にうさぎがぴょんと跳ねて遊ぶ、かやぶき屋根と棚田が広がる里山の田舎駅・・・そんな駅にぴったりの名前だと思いましたが、当レイアウトは日本海縦貫線沿線風の漁村風景。「うさぎのはる」という名前は今後のためにとっておくことにし、海沿いっぽい名前を考えました。
そこで「うさぎのはる」→「はるうさぎ」→「はるうさき」とし、漢字では「春兎崎」
と書くことにしました。うさぎのはるちゃんにちなみ、かつ海沿いっぽい名前になったかな?
・・・ということで、当レイアウトは「はる鉄道 春兎崎(はるうさき)駅と漁村風景」となります。
最後は命名についての戯言、失礼いたしました。
★最近のはるちゃん★
はるちゃんのケージに何だか飾りつけがされているぞ。

そうです。2 月 8 日ははるちゃん 6 歳の誕生日でした。元気に誕生日を迎えられることができて本当に良かったです。

はるちゃんもお祝いゲートをジャンプして通り抜け、嬉しさをアピール(?)していました。

6 歳は人間換算で 52 歳となるようです。ついにはるちゃんは私を追い抜いてしまいました。元気と書きましたが、歳をとってきたせいか、飼い主のまねをしているのか、以前よりじっとしていることが多くなりました。動くのが億劫でゴロゴロしていたい気持ちは分かるように思います。
仕切り直し、Nゲージレイアウトの製作2-5 [鉄道模型レイアウト製作]
こんにちは。
再び始めた鉄道模型 N ゲージレイアウトの製作 5 回目です。
台枠と路盤が完成しましたので、レールを敷きはじめました。

レールは Peco のフレキシブル N ファインを使っています。複線エンドレスの本線部は PC 枕木、待避線や留置線は木枕木にしました。
ギャップとフィーダー位置は下図のようにしました。A1, A2・・・は両ギャップを入れて電気的に分割した区間とフィーダー名を示します。
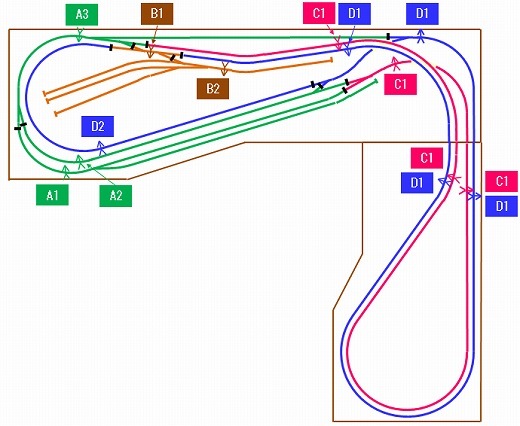
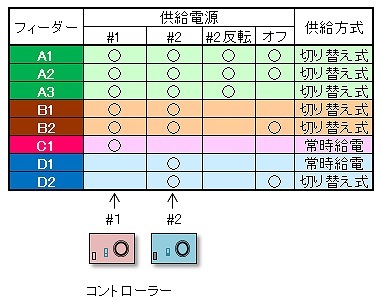
#1, #2 の 2 台のコントローラーで列車を動かす電源を供給します。同時に 2 列車が走行できます。長くなるので細かい説明は抜きにして、それぞれの区間に供給できる電源は上表の通りとしました。
これを元に絶縁ジョイナーでギャップを入れながら線路を敷きます。フィーダー部分は、電源を供給するケーブルをレール裏面に直接またはジョイナー裏面に半田付けする方法としました。
また敷く前に、レール側面をタミヤアクリル塗料レッドブラウンで錆色に塗色しておきました。そして 2mm 厚のコルクシートの上に合成ゴム系接着剤で接着しました。ただし曲線先端部はレールの反発力が強いので 2mm 厚のプラ板の上にエポキシ系接着材でがっちり固定しました。
長方形のモジュールを L 字に連結するのですが、連結部は Tomix のバリアブルレール、その前後も Tomix のレールとしました。Peco のレールとの接続は Tomix のジョイナーを加工して接続しました。この部分は 2mm 厚のコルク板では高さが合わないので 0.5mm 厚の厚紙を上乗せして高さを合わせました。

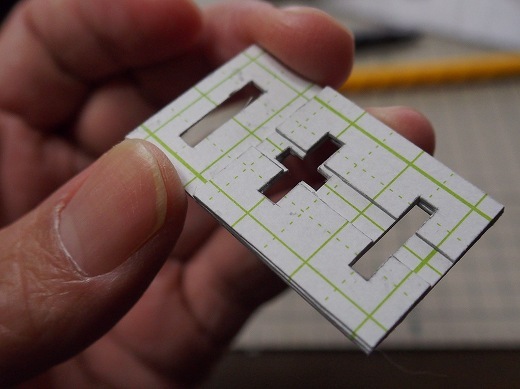
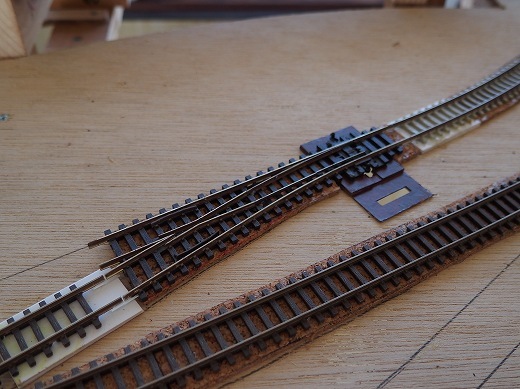
ポイントマシンを取り付ける場所に開けた大きな角穴をふさぐため、レールとポイントマシンの隙間を埋める路盤を 4 種類の形状に切り抜いた厚紙を組み合わせて作りました。
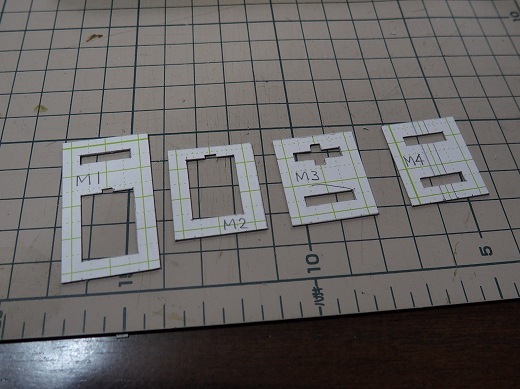
色を塗って取り付けるとこんな感じになりました。
正直言って、フレキシブル線路を敷くのは超面倒です。直線は真っ直ぐになるよう手で地道に調整しました。曲線部はある程度路盤に合わせた後、ニッパで切断して路盤に敷きなおしましたが、曲がり具合を微妙に変えるとレール先端が互いにずれて、隣のレールとうまく接続できず調整に手間取り、1 本レールを敷くのに 2, 3 時間かかった場所もあります。あらかじめ画鋲で路盤に固定した上で先端を浮かして切断したほうがきれいに接続できました。
レールを敷くだけでも時間がかかるため、線路が立体交差する下側部分を除き、複線の片側のみレールを敷いて、まず先に単線で周回運転ができるようにする予定です。それでもまだ 1 ヶ月以上かかりそうですが・・・

毎日天気が悪くて出かけるのが億劫になっている雪の季節をチャンスにし、できるだけ工事を進めたいと思います。
今回の進捗はここまで。
列車やポイントのコントロールは、まずは手動で行うことを前提に進めていますが、並行して自動制御を行いたいという夢があります。
自動制御のコア部分はラズベリーパイを使う計画です。そのためにラズベリーパイに慣れておこうと思います。
「Raspberry Pi とブレッドボードで電子工作」という本に載っている「温度・湿度計」を作ってみました。はるちゃんの居場所付近に設置、測定した温度と湿度を 5 秒毎に交互に表示中・・・
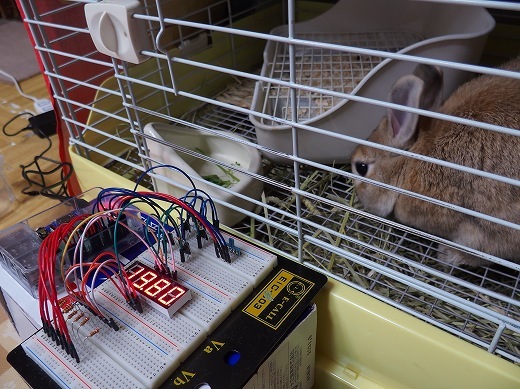
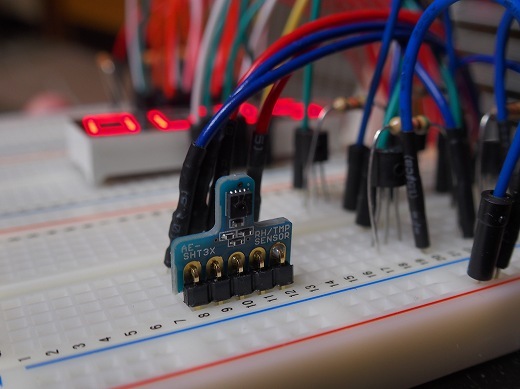
本に掲載されていた回路をほぼそのまま使っています。ただし温湿度センサー AE-HDC1000 が見つからなかったので、同じ I2C インターフェースの「SHT31 使用 高精度温湿度センサモジュールキット」を秋月電子から購入して使いました。
プログラムは本に掲載されていた C言語のソースを参考にしながら新しく作りました。素晴らしいソースを書けている自信はないのでソースを載せるのは勘弁してください。要点のみ書いてみます。
SHT31 から温湿度を読みだす方法はいろいろあるようですが、次の方法で行ってみました。
fd = wiringPiI2CSetup(0x45);
でデバイスをオープン。0x45 は SHT31 モジュールの 4 番ピン ADDR 端子をオープン(内部で VDD にプルアップ)にした時の I2C アドレスです。
buf[0] = 0x24;
buf[1] = 0x0b;
write(fd, buf, 2);
0x240b を write 関数で書き込み。0x240b は測定の繰り返し精度レベルを「中」にする設定。高中低の設定ができますがよく分からないので中にしました。
これで SHT31 が測定を開始します。「中」の場合、測定時間は最大 6ms かかるようですので、usleep 関数で 10ms 待ったあと、
read(fd, buf, 6);
6 バイト read 関数で読み出しました。buf[0], buf[1] が温度データ、buf[3], buf[4] が湿度データ(buf[2], buf[5] はチェックサムで無視)になるはずですので、それを説明書に書かれている式にあてはめて温度と湿度を算出できました。手元の別の温湿度計と比べると数値は合っているようです。
また、ダイナミック式セグメント LED への温湿度の表示ですが、各桁を 5ms 毎に切り替えて表示するようにしました。5ms 毎でも残像効果で私の目にはきちんと点灯して見えました。表示と測定を連続した処理にすると測定時の 10ms の待ち時間で表示がぐらつく可能性があったため、LED の表示処理は pthread_create 関数で実行する専用のスレッドで行い、スムーズに表示されるようにしてみました。
これを使って例えば 10 分毎の温湿度結果を保存するようにし、はるちゃんのケージ周辺の一日の温湿度変化をグラフ化することにより、はるちゃんにとって適切な暖房の方法を考える、なども試してみたいと思いました。
★最近のはるちゃん★
後ろ足をグルーミング中。

バランスをとるための手足の配置が面白いですね。

再び始めた鉄道模型 N ゲージレイアウトの製作 5 回目です。
台枠と路盤が完成しましたので、レールを敷きはじめました。

レールは Peco のフレキシブル N ファインを使っています。複線エンドレスの本線部は PC 枕木、待避線や留置線は木枕木にしました。
ギャップとフィーダー位置は下図のようにしました。A1, A2・・・は両ギャップを入れて電気的に分割した区間とフィーダー名を示します。


#1, #2 の 2 台のコントローラーで列車を動かす電源を供給します。同時に 2 列車が走行できます。長くなるので細かい説明は抜きにして、それぞれの区間に供給できる電源は上表の通りとしました。
これを元に絶縁ジョイナーでギャップを入れながら線路を敷きます。フィーダー部分は、電源を供給するケーブルをレール裏面に直接またはジョイナー裏面に半田付けする方法としました。
また敷く前に、レール側面をタミヤアクリル塗料レッドブラウンで錆色に塗色しておきました。そして 2mm 厚のコルクシートの上に合成ゴム系接着剤で接着しました。ただし曲線先端部はレールの反発力が強いので 2mm 厚のプラ板の上にエポキシ系接着材でがっちり固定しました。
長方形のモジュールを L 字に連結するのですが、連結部は Tomix のバリアブルレール、その前後も Tomix のレールとしました。Peco のレールとの接続は Tomix のジョイナーを加工して接続しました。この部分は 2mm 厚のコルク板では高さが合わないので 0.5mm 厚の厚紙を上乗せして高さを合わせました。

ポイントマシンを取り付ける場所に開けた大きな角穴をふさぐため、レールとポイントマシンの隙間を埋める路盤を 4 種類の形状に切り抜いた厚紙を組み合わせて作りました。


色を塗って取り付けるとこんな感じになりました。

正直言って、フレキシブル線路を敷くのは超面倒です。直線は真っ直ぐになるよう手で地道に調整しました。曲線部はある程度路盤に合わせた後、ニッパで切断して路盤に敷きなおしましたが、曲がり具合を微妙に変えるとレール先端が互いにずれて、隣のレールとうまく接続できず調整に手間取り、1 本レールを敷くのに 2, 3 時間かかった場所もあります。あらかじめ画鋲で路盤に固定した上で先端を浮かして切断したほうがきれいに接続できました。
レールを敷くだけでも時間がかかるため、線路が立体交差する下側部分を除き、複線の片側のみレールを敷いて、まず先に単線で周回運転ができるようにする予定です。それでもまだ 1 ヶ月以上かかりそうですが・・・

毎日天気が悪くて出かけるのが億劫になっている雪の季節をチャンスにし、できるだけ工事を進めたいと思います。
今回の進捗はここまで。
列車やポイントのコントロールは、まずは手動で行うことを前提に進めていますが、並行して自動制御を行いたいという夢があります。
自動制御のコア部分はラズベリーパイを使う計画です。そのためにラズベリーパイに慣れておこうと思います。
「Raspberry Pi とブレッドボードで電子工作」という本に載っている「温度・湿度計」を作ってみました。はるちゃんの居場所付近に設置、測定した温度と湿度を 5 秒毎に交互に表示中・・・

本に掲載されていた回路をほぼそのまま使っています。ただし温湿度センサー AE-HDC1000 が見つからなかったので、同じ I2C インターフェースの「SHT31 使用 高精度温湿度センサモジュールキット」を秋月電子から購入して使いました。

プログラムは本に掲載されていた C言語のソースを参考にしながら新しく作りました。素晴らしいソースを書けている自信はないのでソースを載せるのは勘弁してください。要点のみ書いてみます。
SHT31 から温湿度を読みだす方法はいろいろあるようですが、次の方法で行ってみました。
fd = wiringPiI2CSetup(0x45);
でデバイスをオープン。0x45 は SHT31 モジュールの 4 番ピン ADDR 端子をオープン(内部で VDD にプルアップ)にした時の I2C アドレスです。
buf[0] = 0x24;
buf[1] = 0x0b;
write(fd, buf, 2);
0x240b を write 関数で書き込み。0x240b は測定の繰り返し精度レベルを「中」にする設定。高中低の設定ができますがよく分からないので中にしました。
これで SHT31 が測定を開始します。「中」の場合、測定時間は最大 6ms かかるようですので、usleep 関数で 10ms 待ったあと、
read(fd, buf, 6);
6 バイト read 関数で読み出しました。buf[0], buf[1] が温度データ、buf[3], buf[4] が湿度データ(buf[2], buf[5] はチェックサムで無視)になるはずですので、それを説明書に書かれている式にあてはめて温度と湿度を算出できました。手元の別の温湿度計と比べると数値は合っているようです。
また、ダイナミック式セグメント LED への温湿度の表示ですが、各桁を 5ms 毎に切り替えて表示するようにしました。5ms 毎でも残像効果で私の目にはきちんと点灯して見えました。表示と測定を連続した処理にすると測定時の 10ms の待ち時間で表示がぐらつく可能性があったため、LED の表示処理は pthread_create 関数で実行する専用のスレッドで行い、スムーズに表示されるようにしてみました。
これを使って例えば 10 分毎の温湿度結果を保存するようにし、はるちゃんのケージ周辺の一日の温湿度変化をグラフ化することにより、はるちゃんにとって適切な暖房の方法を考える、なども試してみたいと思いました。
★最近のはるちゃん★
後ろ足をグルーミング中。

バランスをとるための手足の配置が面白いですね。




