Nゲージと16番ゲージレイアウト、はる記念鉄道の製作19 [鉄道模型レイアウト製作]
こんにちは。
はる記念鉄道の前回の記事から、10 ヵ月経過してしまいました。

前回はレイアウトを拡張する、と書きましたが、その拡張部分の土台作りとレール敷設を行い、またとりあえず列車の走行とポイントの切り替えができるよう、配線とコントローラーの作成までを行いました。

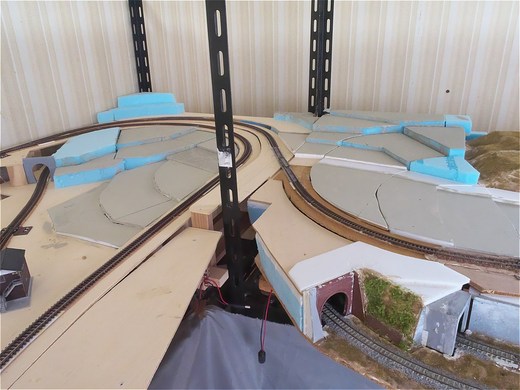
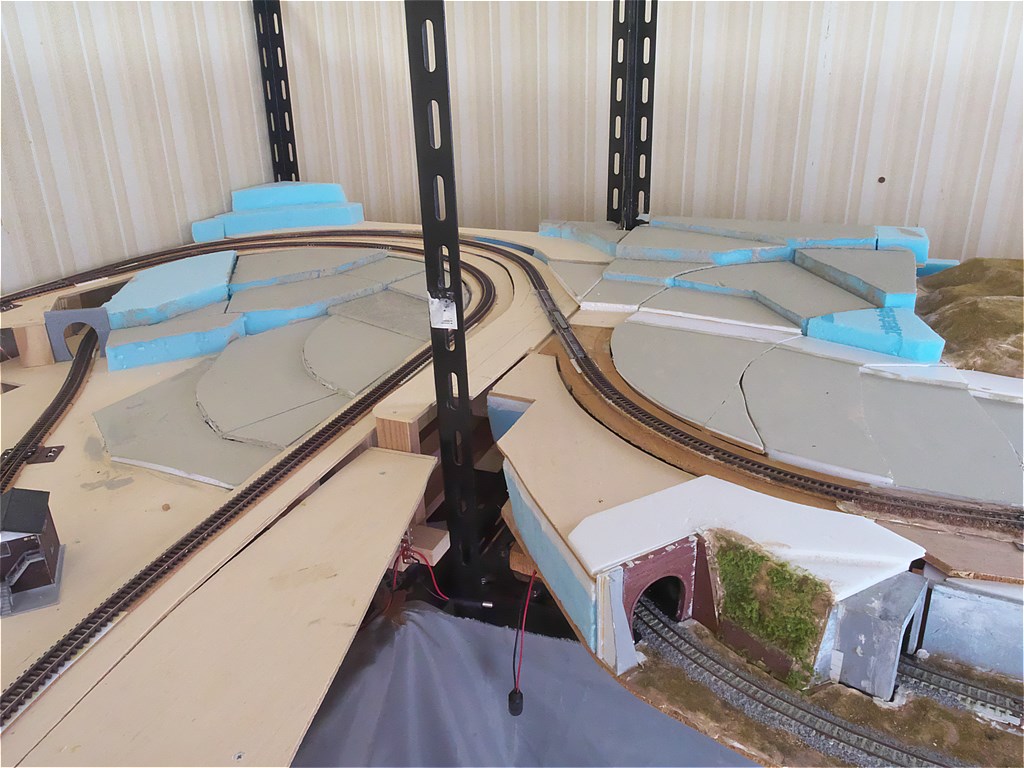
作成したエリアはこの部分です。
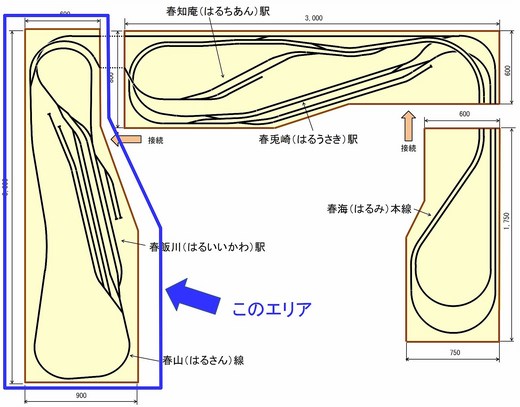
風景はこれからです。中央に川を作りたいと思います。

従来エリアとの接続部付近は棚田にするつもり。
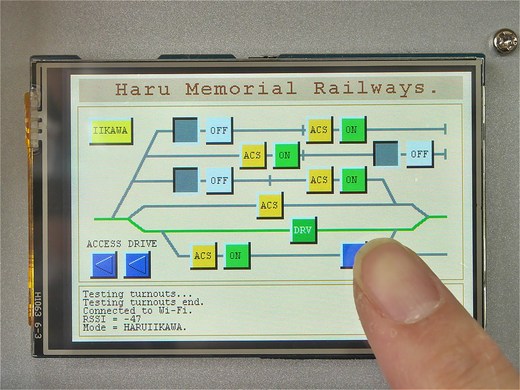
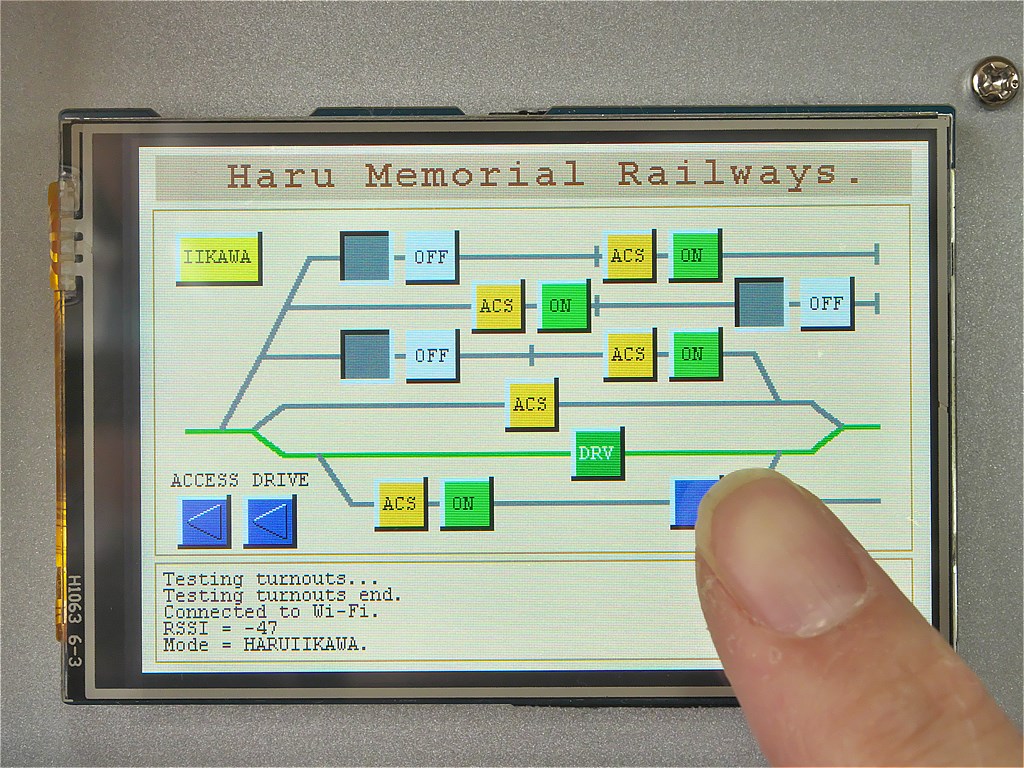
拡張エリアの中心、春飯川駅では列車の入れ替え操作を行いたく、「従来の Raspberry Pi とスマホを利用した操作と、完全手動(ポイント切り替えは一つずつ手でスイッチ操作を行い、列車のコントロールは市販コントローラーでつまみを手動で回す。特に車両の入れ替え操作は完全手操作)を併用する形にしたい」と書きましたが、スイッチ操作は配線が面倒だし、操作も煩わしいので、結局はタッチパネルを設置し、セクションとポイントは該当するボタンをタッチすることで一括して切り替えできるコントローラーを作りました。
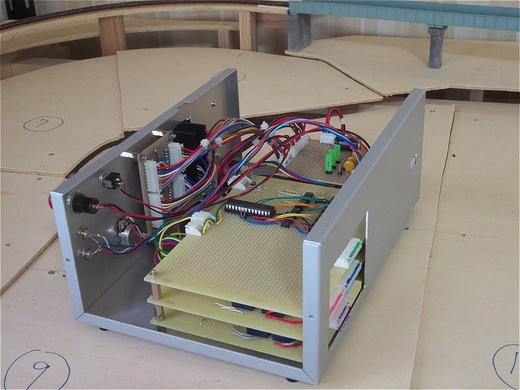
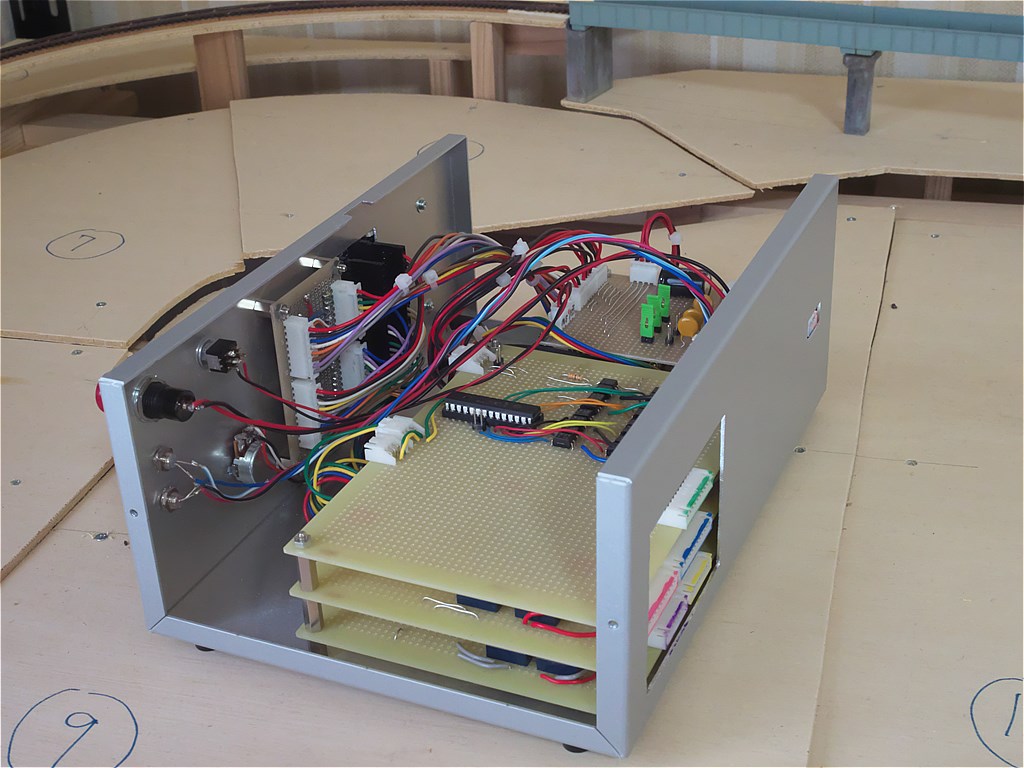
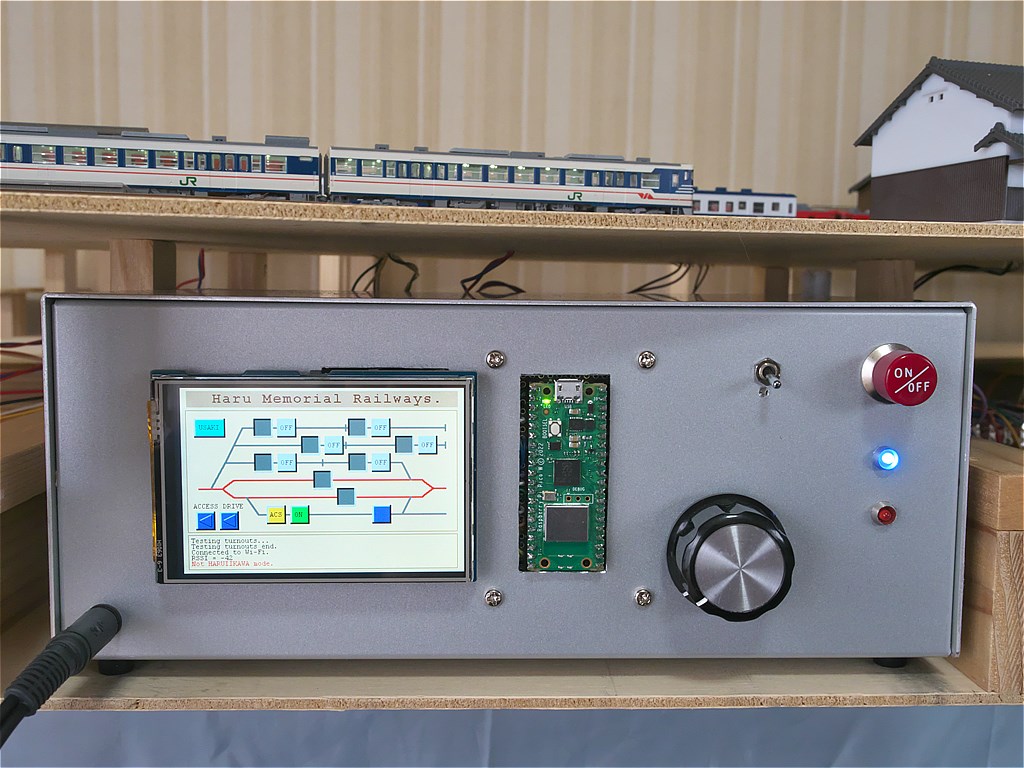
このコントローラーの心臓部はマイコンボード Raspberry Pi Pico です。元々アルミケース内部に設置していましたが、今年 3 月に無線 LAN が使える Raspberry Pi Pico W が発売になったことから、Pico W に変更し、無線 LAN の電波をきちんと送受信できるよう、本体をアルミケースの外に出る位置に設置場所を変更しました。現在は本体が剥き出しになっていますが、いずれ適当なカバーをつけたいと思います。

Raspberry Pi Pico W に変更したことで、従来のエリアで使用中の Raspberry Pi を使ったコントーラーとの運転用の電源やポイント切り替え、センサーの信号などの受け渡しを、通常のケーブルによる配線ではなく無線 LAN で行う仕様に変更し、極力ケーブルによる配線を減らしたいと思います。無線 LAN でのやり取りについては、自分が使いやすいライブラリを作るべく試行錯誤中です。
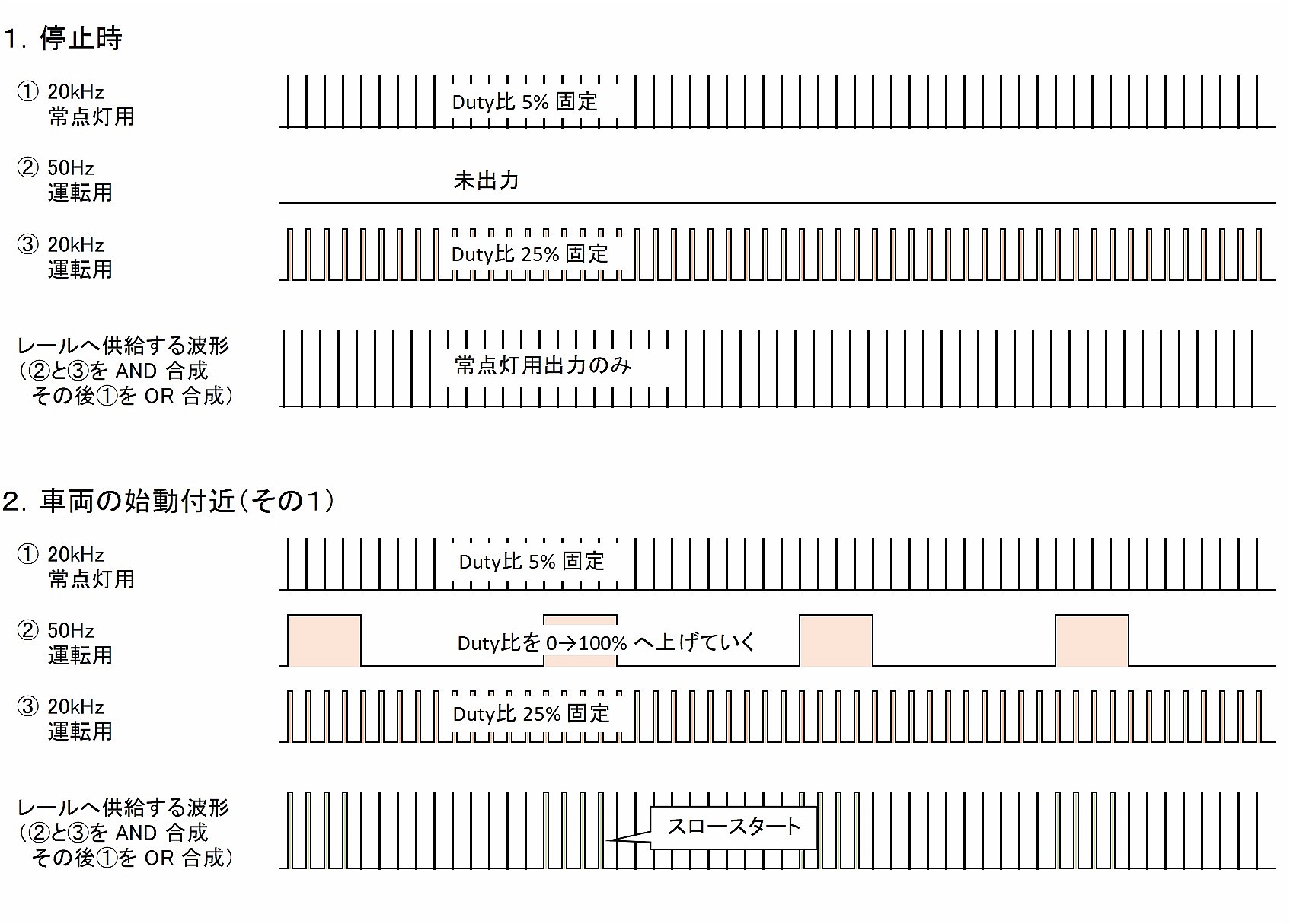
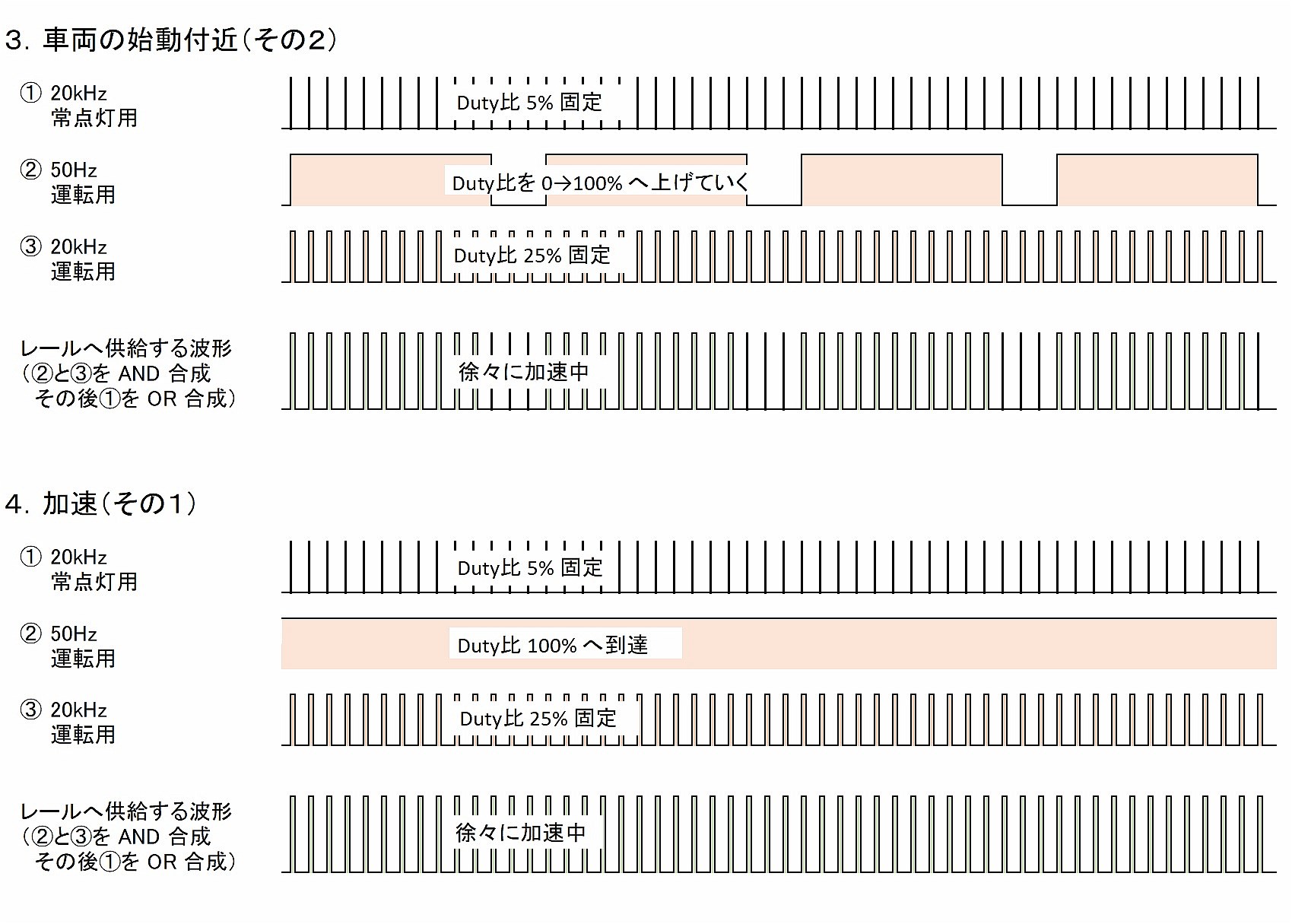
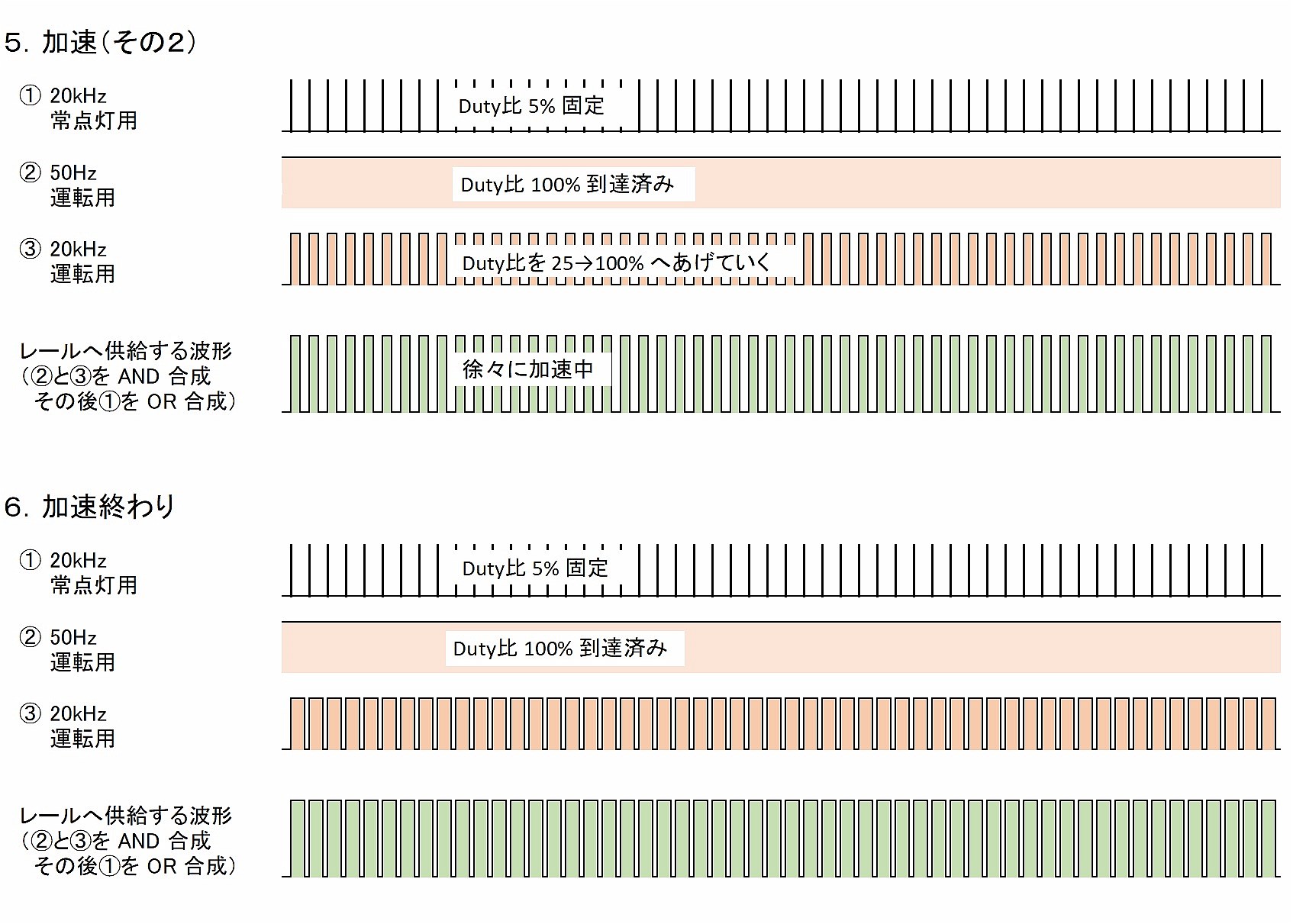
春飯川駅で列車の入れ替え操作を行うことから、超スロー運転を行いたく、常点灯の仕組みと合わせて、Raspberry Pi Pico W で 3 種類の PWM を発生させ、それを合成する形にしました。常点灯は 20kHz で Duty 比 5% 固定の パルス、車両駆動用は 20KHz Duty 比可変の PWM をメインに、車両の始動と停止付近は 50Hz Duty 比可変の PWM を合成するようにしました。私は素人なのでよく分かりませんが KATO の Standard SX などはこのようなコントロールをしているのかなあ、と思って似たような方法を模索しました。一応、加速時の挙動(減速時は逆)を下図に書いてみました。
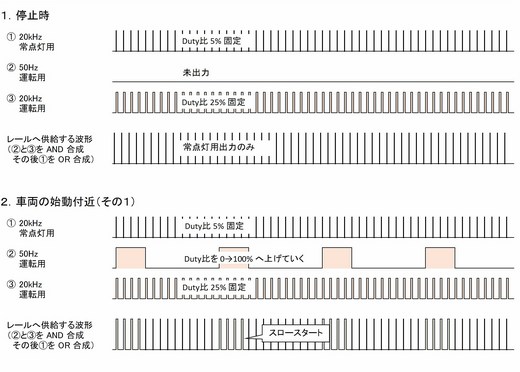
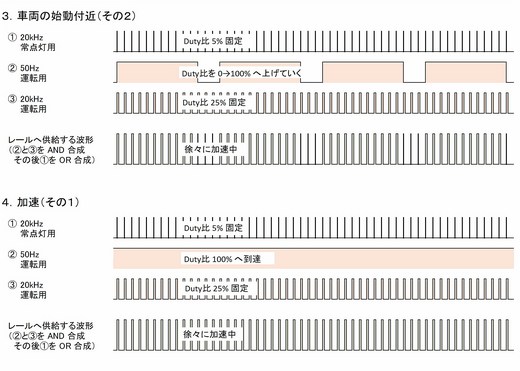
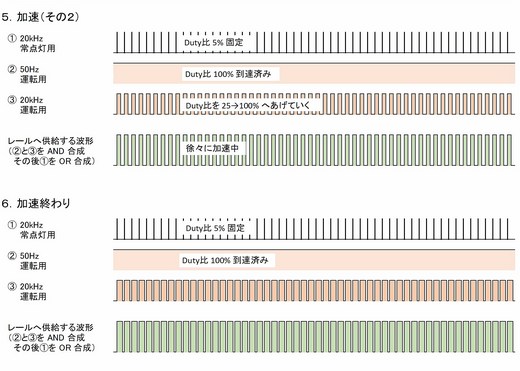
50Hz のような低周波数の PWM 単独の供給では、モーターがブーンとうなりますが、50Hz と Duty比 25% くらいの 20kHz を合成すると、車両のスタートや停止時に 50Hz によってスロー運転ができ、かつモーターのうなり音もほとんど分からない程度に低減しました。20kHz 25% Duty は、車両の始動のタイミングとうなり音の低減の効果が両立できる値だったのでこの値にしていますが、車両によって多少カクカクした動きになったりするので、今後車両に合わせて、50Hz の周波数や、Duty比 25% の値を可変できるようにしたいと考えます。ちなみに KATO や TOMIX の手持ちの車両で試した結果なので、どんな車両でもどんなモーターでも同じようにうまく行くかどうかは不明です。
また、春飯川駅入れ替え時のスピードコントロールは、ラジコンカーのプロポのように手持ちでボリュームのつまみを回す方法にしました。絶妙なコントロールは個人的にはこれがいちばん操作しやすいと思ったからです。

16 番ゲージのほうはほとんど進んでいません。進んだところは、土台はスタイロフォームを予定していた(なるべく軽量化したかった)のをやめて、合板貼りに変更しました。強度や反りの影響などを確認したかったので、1枚だけ貼って様子見をしているところです。

今回は以上ですが、最近は作ってばかりで、レイアウトで大々的に列車を走らせていません。本来の目的は列車は適当に走ってもらって、列車を撮影する人のように線路脇に顔を近付け、走ってくる車両を眺めながらニヤニヤすることなので、レイアウトはできていなくても、たまには列車を走らせる時間を作りたいと思います。
★最近のはるちゃん★
はるちゃんは元気です。

3月 ~ 5月にかけてしょっちゅう病院へ行っていました。まず目が少し白くなってきているように感じたので検査に行きました。結果、白内障ではなく、加齢による核硬化症(治療無し)とのこと、網膜までしっかり光が通っているとのことで安心しました。
次にペレットや牧草を急に食べなくなり、またウンチも出ず、病院へ行きました。何回かの点滴や投薬で、ウンチは出るようになりましたが、粒が小さい状態が治らず、またペレットや牧草を食べない状況が長く続きました。野菜だけは食べるので、野菜ばかりあげていました。
奥歯が少し伸びているようで、歯を削るためには全身麻酔が必要、しかし高齢でリスクがあること、また食べていない現在の状況ではさらにリスクが高いとのことで、歯の治療には踏み切っていません。
何とかペレットや牧草を食べてくれないか、いろいろな品を買ったり、ふやかしたり、フルーツと混ぜたりなど食べさせ方を変えて(強制給餌も何度か行いました)が、ほぼ失敗に終わりました。
5 月になると、少し改善がありました。まず牧草はアルファルファや麦の葉は自主的に食べること、また、ホリホリをするタイミングでチモシーなどを口に近づけると食べてくれること、これは食べるというより齧って捨てているようですが、少しはモグモグと食べているようでした。このホリホリのタイミングは早朝と深夜のため、そのタイミングでチモシーを口に近づけて食べさせる作業を毎日行うようにしました。以前ほどの量ではありませんが次第にペレットも食べるようになり、今に至っています。食べる量が減ったのは加齢も原因の一つではないかと思っています。
現在も毎日朝晩、ホリホリのタイミングでチモシーを食べさせています。何とか牧草をたくさん齧って食べ、お腹の調子や歯の状態が現状を保って欲しいと思います。
6月 ~ 7月、ひんやりベッドでくつろぐはるちゃん。



下写真はいちばん最近、8 月 14 日のはるちゃんです。麦の葉は自主的に食べます。

このような状況なので、会社への通勤や買い物など近所での用事以外、ほとんどどこへも出かけていません(はるちゃん同様、高齢の母親が心配だ、というのもありますが・・・激暑なのに勝手にエアコン停めたりする・・・)。しばらく家で本記事のように鉄道模型レイアウト作成に勤しむ日々が続きそうです。たまには旅行へ行きたいな、と思いつつ、一方で鉄道模型レイアウトもやることがてんこ盛りなので、それはそれで充実していると思っています。
はる記念鉄道の前回の記事から、10 ヵ月経過してしまいました。

前回はレイアウトを拡張する、と書きましたが、その拡張部分の土台作りとレール敷設を行い、またとりあえず列車の走行とポイントの切り替えができるよう、配線とコントローラーの作成までを行いました。

作成したエリアはこの部分です。
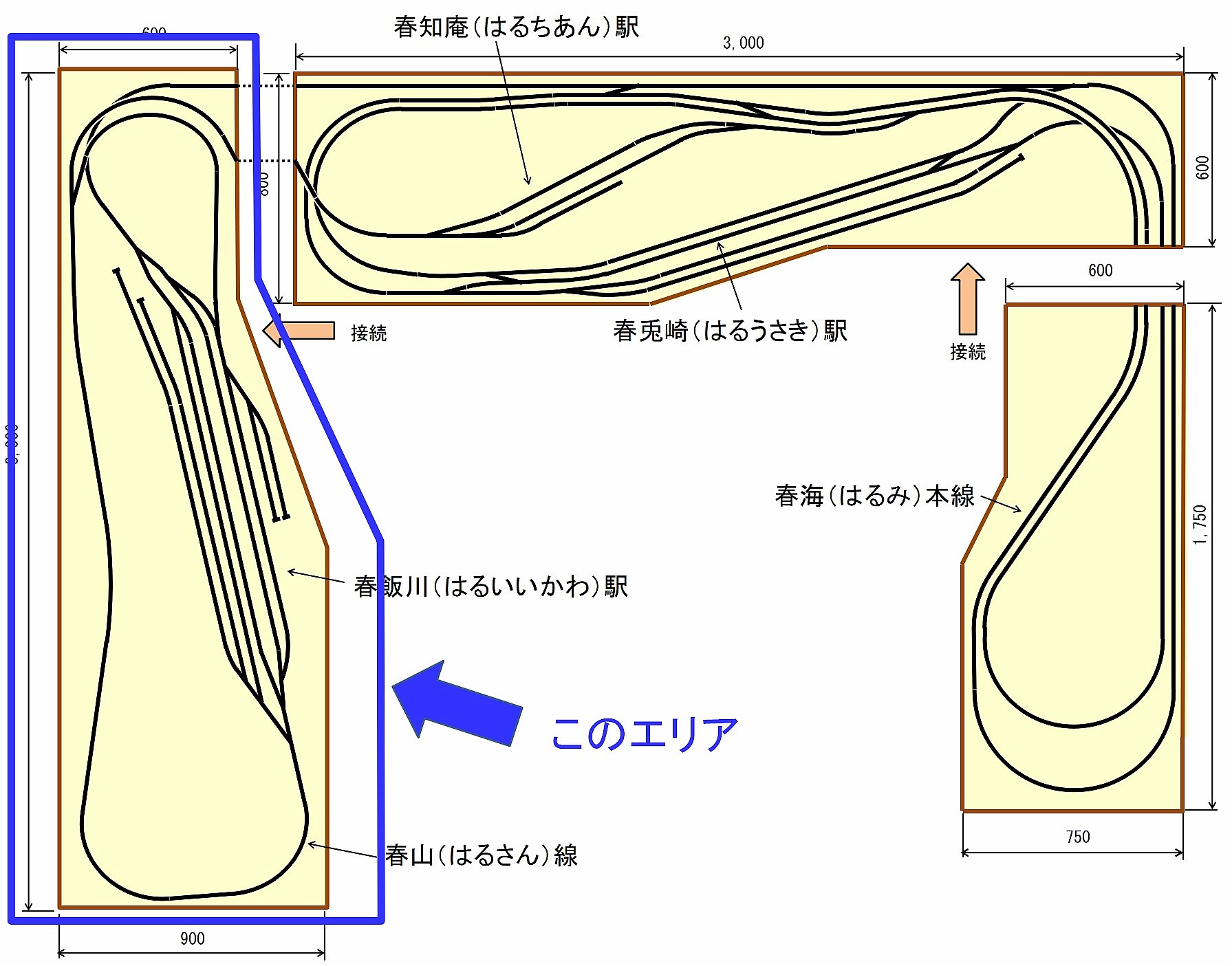
風景はこれからです。中央に川を作りたいと思います。

従来エリアとの接続部付近は棚田にするつもり。
拡張エリアの中心、春飯川駅では列車の入れ替え操作を行いたく、「従来の Raspberry Pi とスマホを利用した操作と、完全手動(ポイント切り替えは一つずつ手でスイッチ操作を行い、列車のコントロールは市販コントローラーでつまみを手動で回す。特に車両の入れ替え操作は完全手操作)を併用する形にしたい」と書きましたが、スイッチ操作は配線が面倒だし、操作も煩わしいので、結局はタッチパネルを設置し、セクションとポイントは該当するボタンをタッチすることで一括して切り替えできるコントローラーを作りました。
このコントローラーの心臓部はマイコンボード Raspberry Pi Pico です。元々アルミケース内部に設置していましたが、今年 3 月に無線 LAN が使える Raspberry Pi Pico W が発売になったことから、Pico W に変更し、無線 LAN の電波をきちんと送受信できるよう、本体をアルミケースの外に出る位置に設置場所を変更しました。現在は本体が剥き出しになっていますが、いずれ適当なカバーをつけたいと思います。
Raspberry Pi Pico W に変更したことで、従来のエリアで使用中の Raspberry Pi を使ったコントーラーとの運転用の電源やポイント切り替え、センサーの信号などの受け渡しを、通常のケーブルによる配線ではなく無線 LAN で行う仕様に変更し、極力ケーブルによる配線を減らしたいと思います。無線 LAN でのやり取りについては、自分が使いやすいライブラリを作るべく試行錯誤中です。
春飯川駅で列車の入れ替え操作を行うことから、超スロー運転を行いたく、常点灯の仕組みと合わせて、Raspberry Pi Pico W で 3 種類の PWM を発生させ、それを合成する形にしました。常点灯は 20kHz で Duty 比 5% 固定の パルス、車両駆動用は 20KHz Duty 比可変の PWM をメインに、車両の始動と停止付近は 50Hz Duty 比可変の PWM を合成するようにしました。私は素人なのでよく分かりませんが KATO の Standard SX などはこのようなコントロールをしているのかなあ、と思って似たような方法を模索しました。一応、加速時の挙動(減速時は逆)を下図に書いてみました。
50Hz のような低周波数の PWM 単独の供給では、モーターがブーンとうなりますが、50Hz と Duty比 25% くらいの 20kHz を合成すると、車両のスタートや停止時に 50Hz によってスロー運転ができ、かつモーターのうなり音もほとんど分からない程度に低減しました。20kHz 25% Duty は、車両の始動のタイミングとうなり音の低減の効果が両立できる値だったのでこの値にしていますが、車両によって多少カクカクした動きになったりするので、今後車両に合わせて、50Hz の周波数や、Duty比 25% の値を可変できるようにしたいと考えます。ちなみに KATO や TOMIX の手持ちの車両で試した結果なので、どんな車両でもどんなモーターでも同じようにうまく行くかどうかは不明です。
また、春飯川駅入れ替え時のスピードコントロールは、ラジコンカーのプロポのように手持ちでボリュームのつまみを回す方法にしました。絶妙なコントロールは個人的にはこれがいちばん操作しやすいと思ったからです。

16 番ゲージのほうはほとんど進んでいません。進んだところは、土台はスタイロフォームを予定していた(なるべく軽量化したかった)のをやめて、合板貼りに変更しました。強度や反りの影響などを確認したかったので、1枚だけ貼って様子見をしているところです。

今回は以上ですが、最近は作ってばかりで、レイアウトで大々的に列車を走らせていません。本来の目的は列車は適当に走ってもらって、列車を撮影する人のように線路脇に顔を近付け、走ってくる車両を眺めながらニヤニヤすることなので、レイアウトはできていなくても、たまには列車を走らせる時間を作りたいと思います。
★最近のはるちゃん★
はるちゃんは元気です。
3月 ~ 5月にかけてしょっちゅう病院へ行っていました。まず目が少し白くなってきているように感じたので検査に行きました。結果、白内障ではなく、加齢による核硬化症(治療無し)とのこと、網膜までしっかり光が通っているとのことで安心しました。
次にペレットや牧草を急に食べなくなり、またウンチも出ず、病院へ行きました。何回かの点滴や投薬で、ウンチは出るようになりましたが、粒が小さい状態が治らず、またペレットや牧草を食べない状況が長く続きました。野菜だけは食べるので、野菜ばかりあげていました。
奥歯が少し伸びているようで、歯を削るためには全身麻酔が必要、しかし高齢でリスクがあること、また食べていない現在の状況ではさらにリスクが高いとのことで、歯の治療には踏み切っていません。
何とかペレットや牧草を食べてくれないか、いろいろな品を買ったり、ふやかしたり、フルーツと混ぜたりなど食べさせ方を変えて(強制給餌も何度か行いました)が、ほぼ失敗に終わりました。
5 月になると、少し改善がありました。まず牧草はアルファルファや麦の葉は自主的に食べること、また、ホリホリをするタイミングでチモシーなどを口に近づけると食べてくれること、これは食べるというより齧って捨てているようですが、少しはモグモグと食べているようでした。このホリホリのタイミングは早朝と深夜のため、そのタイミングでチモシーを口に近づけて食べさせる作業を毎日行うようにしました。以前ほどの量ではありませんが次第にペレットも食べるようになり、今に至っています。食べる量が減ったのは加齢も原因の一つではないかと思っています。
現在も毎日朝晩、ホリホリのタイミングでチモシーを食べさせています。何とか牧草をたくさん齧って食べ、お腹の調子や歯の状態が現状を保って欲しいと思います。
6月 ~ 7月、ひんやりベッドでくつろぐはるちゃん。


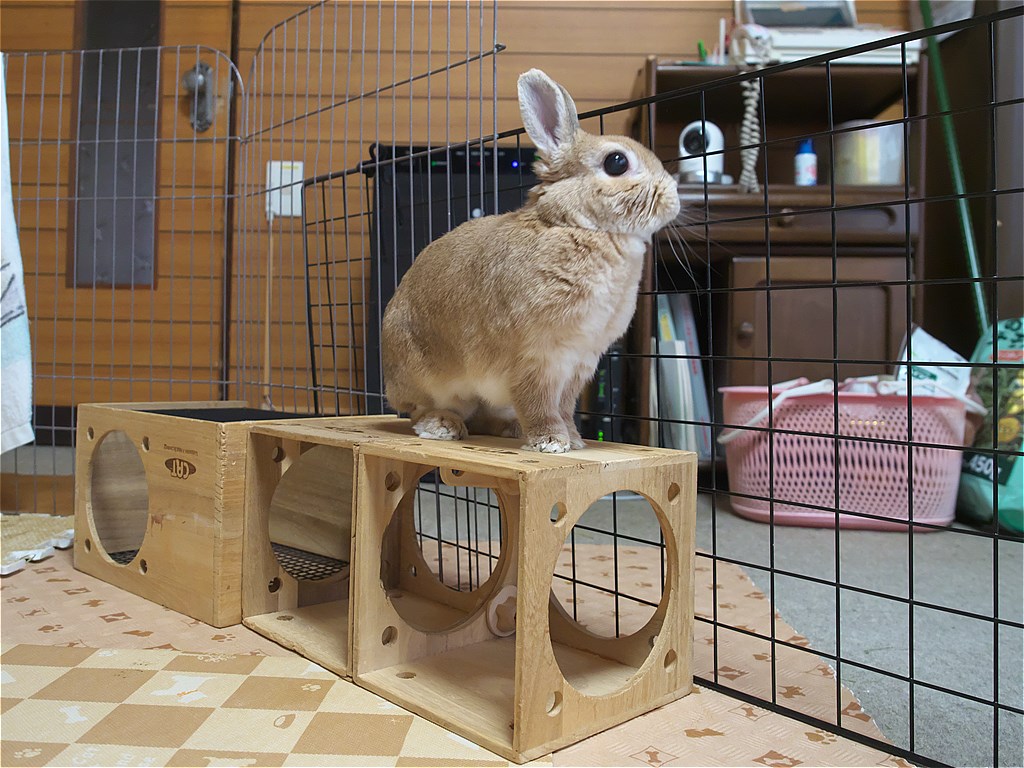
下写真はいちばん最近、8 月 14 日のはるちゃんです。麦の葉は自主的に食べます。

このような状況なので、会社への通勤や買い物など近所での用事以外、ほとんどどこへも出かけていません(はるちゃん同様、高齢の母親が心配だ、というのもありますが・・・激暑なのに勝手にエアコン停めたりする・・・)。しばらく家で本記事のように鉄道模型レイアウト作成に勤しむ日々が続きそうです。たまには旅行へ行きたいな、と思いつつ、一方で鉄道模型レイアウトもやることがてんこ盛りなので、それはそれで充実していると思っています。



